2025年7月23日·1 分
STMicroelectronics プラットフォームとセンサー:自動車・IoT・産業
STMicroelectronicsの組み込みプラットフォーム、マイコン、センサーエコシステムが自動車の安全性、IoT製品、産業制御システムをどのように支えるかを解説します。
STのプラットフォームとセンサーエコシステムの意味
組み込みプラットフォームとは、電子製品を構築するための「部品キット」です。通常はメインのチップ(マイコンやプロセッサ)、補助回路(電源、クロック、通信)、リファレンス設計、そしてアイデアから動作するデバイスに到達するためのソフトウェアツールやライブラリが含まれます。
センサーエコシステムは、モーション、圧力、温度などのセンサー本体に加え、ドライバ、キャリブレーションガイダンス、サンプルコード、場合によっては生データを有用な情報に変換する既製アルゴリズム群を指します。
なぜプラットフォームが重要か
プラットフォームは、チームが毎回基礎部分を再発明する代わりに実績のある構成要素を再利用できるようにするため重要です。
同一のサポートがあるプラットフォームファミリ内に留まると、通常得られる利点は:
- 開発の高速化:すぐ使えるファームウェアライブラリ、評価ボード、サンプルプロジェクトでプロトタイピングが速くなる
- スケーリングの容易さ:低コストデバイスから高性能版へ移行しても全てを書き直す必要がない
- 量産の予測可能性向上:リファレンス設計や検証済み組み合わせが、プロトタイプから製造に移す際の不意の問題を減らす
STMicroelectronicsに関して言えば、「プラットフォーム」はしばしばSTM32(MCU)、STM32MPx(MPU)、通信チップ/モジュール、電源ソリューション、開発ツールの組み合わせを意味し、センサーエコシステムはSTのMEMSセンサーとモーション処理や環境計測をサポートするソフトウェアを含みます。
本ガイドで期待すること
この記事は、コンピュート(MCU/MPU)、センシング(MEMS/環境センサー)、通信、電源、セキュリティといった共通のSTビルディングブロックと、それらが実製品でどのように組み合わさるかに焦点を当てます。目標は全ての型番を列挙することではなく、互換性のある部品を選ぶ際の「システム思考」を理解する手助けをすることです。
車、IoT、工場にどう当てはまるか
- **自動車(車載電子)**は安全性、信頼性、車内ネットワークを重視します。センサーは安定性、快適性、監視のような重要な機能にデータを供給します。
- IoTエッジデバイスは低消費電力、小型、滑らかなユーザー体験を最適化します。センサーと無線は効率的である必要があります。
- 産業オートメーションは決定論、長寿命、過酷環境での復元力を重視します。プラットフォーム選択は数年単位で安定していることが求められます。
この三つのドメインを念頭に、以降のセクションではSTのプラットフォームアプローチがどのようにシステム構築を容易にするかを示します。
コア構成要素:MCU、MPU、周辺回路
「STプラットフォーム」と語るとき、多くはコンピュートコア(MCUまたはMPU)と、そのデバイスを実用的にする周辺回路やソフトウェアサポートを指します。早めに適切なコアを選ぶことは、特にセンサー、通信、リアルタイム動作が絡む場合に後の設計変更を防ぎます。
MCUとMPU:役割の違い
マイクロコントローラ(MCU)—たとえば多くのSTM32ファミリ—は、制御ループ、センサー読み取り、モータ駆動、シンプルなUI管理、一般的な通信(BLE/Wi‑Fiモジュール、CANトランシーバなど)に適しています。起動が速く、一つのファームウェアイメージで動き、予測可能なタイミングに優れます。
マイクロプロセッサ(MPU)—STM32MP1クラスなど—は、より重いデータ処理、リッチなグラフィックUI、Linuxベースのネットワークスタックが必要なときに使います。アプリ風機能(ウェブUI、ログ、ファイルシステム)を簡素化できますが、消費電力やソフトウェアの複雑さは増えます。
設計を決める周辺回路
コアは物語の半分に過ぎません。周辺回路セットが選択を左右することが多いです:
- ADC/DAC:アナログセンサ、バッテリ監視、オーディオや制御出力
- タイマとPWM:モータ、LED、電源段、精密サンプリング
- CAN(車載変種含む):車両ネットワーク、産業ノード
- SPI / I²C:センサー、メモリ、拡張チップ
- USB:データ、電源、デバイス設定、ファームウェア更新
もし複数の高速SPIバスや同期PWM、特定のCAN機能が必要なら、CPU性能より先に選択肢が絞られます。
リアルタイム動作:遅延と決定性
リアルタイムは単に「速い」ではなく、一貫していることです。制御システムは最悪時遅延、割り込み処理、センサー読み取りとアクチュエータ出力の予定通りの実行を気にします。割り込みやタイマが良く設計されたMCUは決定性に最も簡単に到達できます。MPUでも可能ですが、OSやドライバの調整が必要です。
演算選択がBOM、消費電力、ファームウェアに及ぼす影響
高性能プロセッサは外付けチップを減らしたり(コンパニオンICが少なくて済む)、リッチな機能を可能にする一方で、電力予算、熱設計、ファームウェア労力(ブートチェーン、ドライバ、セキュリティ更新)が増えます。単純なMCUはBOMと消費電力を下げますが、ファームウェア最適化や専用アクセラレータ/周辺回路での複雑さが増すことがあります。
センサポートフォリオ基礎:MEMSから環境センシングまで
STのセンサーラインナップは、スマートウォッチから車両安定化システムまで、ベンダーを混ぜずに構築できるほど幅広いです。実務的な価値は一貫性にあります:似た電気的インターフェース、ソフトウェアサポート、長期供給性。プロトタイプから量産までスケールしても整合性が取りやすい点が利点です。
よく使われるセンサー種類
ほとんどの組み込み製品は少数の「ワークホース」センサーで始まります:
- 加速度計・ジャイロ(IMU):モーション、振動、傾き、回転を検出。ステップ計測、タンパー検出、ツール追跡、車両力学などに利用。
- 圧力センサー:高度推定、HVAC監視、水位・ポンプ制御、漏れ検知
- 温度センサー:熱保護、校正、快適性/品質監視
- 磁気センサー(磁力計):コンパス方位、蓋開閉検出、磁石を使った回転位置検出
- ToF/近接センサー:距離や存在検出、ジェスチャ、ウェイクオンアプローチ
「MEMS」が意味するもの(なぜ普及しているか)
MEMSはマイクロ電気機械システムを指し、シリコン上の微小な機械構造です。ICのようにパッケージされ、小型かつ低消費電力で製造可能なため、スマートフォンやイヤフォン、ウェアラブル、高密度な産業ノードに適しています。量産性と小型化がコストと信頼性の両面で有利です。
購買担当者が比較する仕様(実際に影響する点)
センサー選定でチームが比較する一般的項目:
- レンジ:最大測定値。低すぎると飽和、高すぎると分解能低下
- ノイズ:静止時の読み値の安定性。モーショントラッキングや低振幅振動に重要
- ドリフト(特にジャイロ):長期精度と補正頻度に影響
- 帯域幅:変化に対する応答速度。制御ループや振動解析で重要
- サンプリングレート(ODR):1秒あたりの読み取り回数。応答性と消費電力に影響
実用的なトレードオフ:精度、コスト、電力、配置
高い仕様はコスト増や消費電力増につながりますが、機械的な配置も同じくらい重要です。例えばIMUを回転中心から遠い位置や振動モータ付近に置くと、フィルタリングと基板設計を工夫しないと性能を引き出せません。小型デバイスでは、少し低消費電力のセンサーを選び、配置、キャリブレーション、ファームウェアで滑らかにすることが多いです。
センサフュージョンとエッジインテリジェンス
生のセンサー信号はノイズが多く、バイアスがあり、単体では曖昧です。センサフュージョンは加速度計、ジャイロ、磁力計、気圧センサ、場合によりGNSSを組み合わせ、姿勢、動き、ステップ、振動の深刻度、静止/移動判定などのより意味ある推定を作ります。
なぜ生データだけでは不十分か
加速度計は加速度を示しますが、急な動きのときに重力と運動を区別できません。ジャイロは回転を滑らかに追跡しますが時間とともにドリフトします。磁力計は方位ドリフトの補正に有効ですが、近くの金属やモータによる誤差を受けやすい。融合アルゴリズムはこれらの長所と短所を組み合わせて安定した結果を作ります。
実例
- 姿勢追跡:スマホ、ウェアラブル、ドローン、車内制御が6軸/9軸データを融合して応答性の高い姿勢を得る
- 振動監視:高レート振動と温度や稼働状態を融合して通常振動と軸受摩耗を区別する
- モーション検出:超低電力の“wake on motion”はセンサハブ/MCUで実行してメインプロセッサを眠らせる
- デッドレコニング補助:短時間のGNSS途切れをIMU推定で補う(トンネルや市街地で有効)
エッジ処理と生データ送信の比較
STのMCU、組み込みセンサハブ、スマートMEMSデバイスで融合を実行すると帯域が劇的に削減されます:何千サンプル/秒を送る代わりに「tilt = 12°」を送るだけです。プライバシーも向上し、生の動作記録をデバイス内に留めてイベントや集計値のみを送信できます。
キャリブレーションとフィルタリング:デモと実運用の差
信頼できる融合はキャリブレーション(オフセット、スケール、アライメント)とフィルタ(ローパス/ハイパス、外れ値除去、温度補償)に依存します。実製品では磁気干渉、取り付け方向のばらつき、製造差を考慮しなければ、同じ設計でもユニット毎や経時で挙動が変わることがあります。
自動車分野:安全性、信頼性、車載ネットワーク
自動車は特殊な組み込み環境です:電気的ノイズが多く、温度変動が大きく、長年安定して動作することが期待されます。このため、車載向けMCU、センサー、電源部品は仕様だけでなく認証、ドキュメント、長期供給性で選ばれることが多いです。
典型的な車載ユースケース
STのプラットフォームは車両の複数ゾーンに現れます:
- ボディ制御・快適性:ドアモジュール、照明制御、シート機能、パワーウィンドウ、気候制御インタフェース
- インフォテインメント操作部:ステアリングスイッチ、ロータリノブ、ハプティック入力、センサ駆動のユーザーインタラクション
- 運転支援サポートコンポーネント:センサインターフェース、タイミング/監視タスク、より大きなADASコンピュータを補助するローカルI/Oの決定論的制御ループ
- 監視:バッテリ/電圧検出、温度トラッキング、モータ電流測定、システムヘルスチェック
車内ネットワーク:CANとLINの基本
ほとんどの車載ECUは単独で動作しません。車内ネットワークで通信します:
- LIN:より単純で低速なノード(ドアモジュールなど)に使われ、コスト効率が良く「1マスター・多スレーブ」構成で適する
- CAN:ECU間の高速・重要通信に使われ、マルチノードメッセージングや強いエラーハンドリングをサポートする
MCUに内蔵されたCAN/LINサポート(またはトランシーバとの容易な組み合わせ)は、配線・コストだけでなくタイミング動作や車両への統合のしやすさにも影響します。
信頼性制約と安全プロセスの役割
車載設計は温度範囲、EMI/EMC耐性、長期サービス寿命に耐える必要があります。別途、機能安全(functional safety)は要求、解析、試験、ツールサポートを体系的に行うアプローチで、安全関連機能を検証可能に設計することを重視します。安全機能でない場合でも、その考え方の一部を採用することが後工程の手戻りを減らします。
IoTデバイス:電力、サイズ、ユーザー体験
スナップショットで安全に反復
動作する状態を保存し、センサーのロジックやUI変更で問題が起きたら素早くロールバック。
多くのIoT製品は「地味な」制約で成功が決まります:バッテリ寿命、筐体サイズ、デバイスの応答性と信頼性。STのプラットフォームとセンサーエコシステムは、センサー精度、ローカル演算、通信を過剰設計せずにバランスを取れる点で選ばれます。
典型的なIoTアーキテクチャ(とST部品の位置)
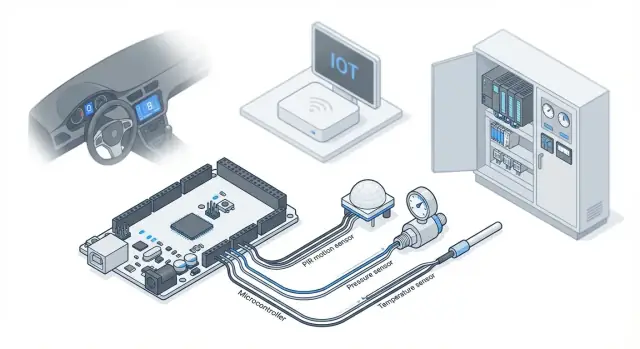
実用的なIoTパイプラインは通常:センシング → ローカル演算 → 通信 → クラウド/アプリ、です。
センサー(モーション、圧力、温度、生体信号)が生データを出し、低消費電力MCUがフィルタ、閾値処理、単純な判定を行い、必要なときだけ無線が送信します。通信(Bluetooth LE、Wi‑Fi、Sub‑GHz、セルラー、LoRaなど)は選ばれたデータをスマホやゲートウェイへ送り、ダッシュボードやアラートに使われます。
要点:ローカルで判断できるほど、バッテリと通信コストが小さくできます。
電力予算の考え方:スリープ、デューティ、イベント起動
バッテリ寿命はピーク電流よりも「眠っている時間」に依存します。良い設計はまず予算を立てます:1日あたり何分デバイスが起きてサンプリング、処理、送信するか。
- スリープモード:MCUを深い低電力状態に保つ
- デューティサイクル:サンプリング頻度を定義(例:10分毎 vs 10秒毎)
- Wake-on-event:モーションセンサーからの割り込み等で意味あるイベント時のみ起動する
ここでセンサー機能が重要です。イベント検出をセンサー側で行えると、メインプロセッサや無線の不必要な起床を防げます。
トレードオフの具体例
- スマートロック:即時感のある起床と確実なモーション/タッチ検出が必要。誤トリガーはバッテリ消耗とユーザー不満の原因。
- ウェアラブル:センサー品質はステップカウントや心拍の安定性に直結。フィルタが不十分だとノイズの多いグラフで信用を失う。
- アセットトラッカー:位置と動作のチューニングで頻繁な報告を避けつつ実際の移動を検出する必要がある。
- ホームセンサー:適切なサンプリングとバッチ送信で数年運用が可能。
センサー選択がUXを形作る方法
UXはアプリだけでなく、デバイスの振る舞いも含みます。振動で誤検出するモーションセンサーは幻のアラートを生む。応答が遅い環境センサーは実際の変化を取りこぼす。電力設計が際どいと「1年バッテリ」が3ヶ月になってしまうこともあります。
ノイズ、レイテンシ、低消費電力能力に基づき、センサーとMCUを一緒に選ぶことで、応答性があり誤報の少ない、バッテリ寿命を満たすデバイスを提供できます。
産業制御:決定性、過酷環境、長寿命
産業制御は派手な機能よりも「長期間にわたる予測可能な動作」が重要です。PLCに付随するモジュール、モータドライブ、コンディションモニタリングノードなどを構築する際、プラットフォーム選択は決定論的タイミング、過酷環境耐性、保守性をサポートする必要があります。
産業システムでのSTプラットフォームの利用例
一般的なパターンはPLCの“サイドカー”としてのマイコンベースモジュール:追加I/O、特殊計測、通信を提供し、制御盤全体の再設計なしに機能追加をするケースです。STのMCUはモータ制御、計測、状態監視などで広く使われ、リアルタイム制御ループとセンサー取得、ローカル判断を組み合わせます。
決定性:信頼できるタイミング
決定論的制御はサンプリング、制御ループ実行、出力が毎周期期待通りに行われることを意味します。実務的な要素:
- 正確なモータ制御とアクチュエータタイミングのためのハードウェアタイマとPWM
- サンプリングや安全反応のための高速で予測可能な割り込み処理
- 電流検出等の測定→アクション経路のためのADCやコンパレータ
目標は通信、ログ、UIが忙しくなっても時間クリティカルな処理を安定させることです。
過酷環境:振動、粉塵、電気ノイズ
産業環境は消費者向けよりも機械的ストレスや電気的干渉が大きいです。懸念点はモータ周辺での振動、粉塵や湿気の侵入、スイッチング負荷から来る電気ノイズ。センサーの選定と配置は重要です—振動監視用加速度計、ドライブ向けの電流/電圧センシング、筐体条件が信頼性に影響する場合の環境センサーなど。
統合の必須要素:アイソレーション、AFE、信号品質
多くの産業信号はそのままマイコンに入れられません。
- アイソレーション:高電圧領域やノイズの多い配線と接続するときに保護のため必要
- アナログフロントエンド(AFE):低レベルセンサ出力を整え、フィルタし、ADCに合わせてスケーリングする
- 信号品質:レイアウト、グラウンディング、フィルタでEMIによる誤読を減らす
長寿命と保守性
産業導入は長期運用を前提に計画します:代替ユニット、部品の入手可能性、運用停止を避けるファームウェア更新。実践的な寿命管理はバージョン管理されたファームウェア、安全な更新機構、明確な診断を含み、保守チームが迅速にトラブルシュートできることが求められます。
車・IoT・工場共通の通信選択
モバイルコンパニオンを素早く作る
Koder.aiチャットでセットアップ、ステータス、アラート用のFlutterコンパニオンアプリを作成。
通信は単なる「基板とセンサー」からシステムへ変える要素です。STベースの設計は用途に応じてMCU/MPUと1つ以上の無線あるいは有線インターフェースを組み合わせます。
一般的な選択肢(得意分野)
BLE:短距離でスマホや設定ツール、近隣ハブとの接続に最適。低電力で扱いやすいが長距離・高スループット向けではない。
Wi‑Fi:ルータ直結型(カメラ、家電、ゲートウェイ)に高スループットを提供。消費電力が大きく、アンテナ・筐体設計が重要。
Ethernet:工場での有線信頼性と予測可能性のための定番。帯域要件が増す車載ではAutomotive Ethernetも使用される。
セルラー(LTE‑M/NB‑IoT/4G/5G):インフラが無い広域カバレッジが必要な場合に利用。コスト、認証、電力設計の負担が増える。
Sub‑GHz(868/915 MHz等):低データレートで長距離伝送が可能。小さなパケットをまばらに送るセンサー向け。
どう選ぶか:範囲、スループット、電力、規制
まず範囲とメッセージサイズを決め(温度値1件と音声ストリームは異なる要件)、次にバッテリ寿命とピーク電流を検証し、最後に地域ごとの規制(セルラーのライセンス、Sub‑GHzのチャネル/送信出力制限等)を確認します。
ゲートウェイ対ダイレクトクラウド
ローカルゲートウェイは超低電力エンドポイントを使う場合、プロトコル間ブリッジが必要な場合、またはインターネット断時のローカルバッファリングが必要な場合に有効です。
ダイレクトクラウドは単体デバイスの構成を簡素化しますが、電力設計、プロビジョニング、継続的な接続コストは増えます。
実務的設計示唆:アンテナと筐体
金属筐体、バッテリ、ケーブル束、あるいはユーザーの手でアンテナ性能が損なわれることがよくあります。クリアランスを確保し、材料を選び、最終筐体で早期に試験すること。通信問題の多くはファームウェアではなく機械的要因に由来します。
セキュリティとデバイスライフサイクル:起動から更新まで
セキュリティは後付けで「追加する」ものではありません。組み込みプラットフォームとセンサーでは、電源投入時点から製品廃止まで続く決定の連鎖です。
実務的なセキュリティ要素
基礎はセキュアブートです:デバイスはファームウェアの真正性を検証してから実行します。STプラットフォームでは、ハードウェアルートオブトラスト(MCUのセキュリティ機能や専用セキュリティ要素)と署名付きイメージで実装されることが多いです。
次に鍵保管です。鍵は抽出に強い領域(保護されたMCU領域やセキュアエレメント)に置き、平文フラッシュに保存しないでください。これにより、署名検証(整合性/真正性)と暗号化(機密性)を用いた安全なアップデートが可能になります。
ドメインごとに変わる脅威モデル
コンシューマIoTは大規模なリモート攻撃(ボットネットや認証情報使い回し、安価な物理アクセス)に直面することが多いです。産業システムは標的型の妨害やダウンタイム、パッチ適用ウィンドウの制約を重視します。車載は安全に関連するリスク、複雑なサプライチェーン、複数ECU間での更新制御などに備える必要があります。
ライフサイクル思考:プロビジョニングから除去まで
プロビジョニング(製造時の鍵・ID注入)、更新(A/Bスワップやロールバック防止)、廃棄(資格情報取り消し、機密データ消去)を計画してください。
コンプライアンスで文書化すべきこと(過大な主張は避ける)
脅威モデル、セキュアブート/更新フロー、鍵管理とローテーション方針、脆弱性受け入れとパッチポリシー、SBOM、テスト証拠(ペネトレーション結果、ファジングノート、安全なコーディング実践)を記録しておきます。正式な認証を主張するなら、その認証を実際に取得していることを明記してください。
電力管理と熱設計の実務
電力と熱は組み込み製品で密接に結びついています:無駄なミリワットは温度上昇になり、温度はセンサー精度やバッテリ性能、長期信頼性に直接影響します。早期に対処すると基板のやり直しを減らせます。
電源レール:エネルギーの「形」
ほとんどの設計はバッテリ/入力レール、ロジック用の一つ/複数のレギュレートレール(多くは3.3Vや1.8V)、場合によってはアクチュエータや表示用の高電圧レールを持ちます。
実務的ルール:
- バック(降圧)レギュレータは高い入力電圧から効率的に降圧する際のデフォルト
- ブーストレギュレータはコインセルや単セルLi‑ionで終電圧付近でも動作が必要なときに有効
- バック‑ブーストは入力が目標電圧の上下を行き来する場合に有用
- LDOは簡素でノイズが小さい(感度の高いアナログやRFに有効)反面、電圧差に比例して熱を作るので戦略的に使う
バッテリ管理は化学特性に合った保護/充電を選び、電圧低下時(ブラウンアウト)にMCU/センサー/メモリがどう振る舞うかを設計で考慮します。
ピークと平均電流:センサーと無線が罠を仕掛ける
多くの製品は平均電流で設計してピークを忘れ、バッテリ寿命目標を逃します:
- ラジオ(BLE、Wi‑Fi、セルラー)は送受信や接続確立時に短い高電流パルスを引き起こす
- センサーは起動時や高性能モード、ODR増加時にスパイクを生む
レギュレータとデカップリングはドロップなしにピークを処理できる必要があり、ファームウェアはスリープとデューティで平均を低く保ちます。
熱:筐体+周囲温度+デューティサイクル
熱はチップだけの問題ではありません。筐体材料、気流、取り付け面が支配的になることが多いです。必ず検討:
- 最悪ケースの周囲温度(工場キャビネットや車は実験室よりずっと高温になる)
- デューティサイクル(継続的ストリーミング vs 断続バースト)
- レギュレータやパワースイッチ、RF PAの局所的発熱
バッテリ寿命を改善しつつ応答性を維持するチェックリスト
- 実ワークロードを測定し、ピーク/平均電流をログする(典型値ではなく実測を使う)
- センサーは低消費電力モードを基本にし、必要時だけODRを上げる
- データをバッチ化・圧縮して送信回数を減らす
- 常時ポーリングの代わりに割り込み(モーション/閾値)を使う
- レギュレータ効率を実負荷で検証する(特に軽負荷時)
プロトタイピングから量産へ:エコシステムツールと検証
ソフトウェアのペースを保つ
組み込みプロトタイプが速く進むなら、Koder.aiでソフトウェア側を追いつかせる。
プロトタイプを動かすのは始まりに過ぎません。本当に時間を節約するのは、STプラットフォーム周辺のエコシステムを使って、PCBスピンや認証、製造ランに入る前にやり直しを減らすことです。
既製のビルディングブロックで開発を加速
STの評価ボードやサンプルプロジェクトは、量産への道筋を保ったままアイデアを素早く実証できます:
- Nucleo / DiscoveryボードはSTM32向けの安定した基礎(演算・デバッグ・電力測定)を提供
- センサー拡張ボード(X-NUCLEO)やSensorTile系キットはアナログフロントエンドを自作せずにモーション・環境センシングを検証可能
- リファレンス設計とSTM32Cubeパッケージは動作するファームウェアパターン(ドライバ、ミドルウェア、デモアプリ)を提供し、製品向けに削ぎ落としていける
これらは「学習ハードウェア」として扱い、変更点を記録し、まだ検証が必要な仮定をリストアップしてください。
デバイス周りのソフトウェアを忘れないで
組み込み側が「できた」後でも、プロビジョニング画面、ダッシュボード、ログ、アラート、製造・現場サポート用の簡易APIなどの補助層が必要です。多くのチームがこれを過小評価します。
ここはチャットベースの仕様から軽量なWebダッシュボードやGo+PostgreSQLバックエンド、Flutterモバイルアプリを生成して反復するようなワークフロー(例:Koder.ai)を使うと、オンデバイステレメトリや要件が変わるパイロット段階で素早く調整できます。
リスクの高い部分は早期に検証(ハードウェア固着前に)
一部の不具合は実物になって初めて出ます:
- 筐体内でのセンサー性能:取り付け、接着剤、振動経路、気流が読み値を変えることがある(特にモーションと環境センサ)
- 実際の場所でのRFレンジ:最終アンテナ配置、プラスチック材料、ケーブル配置、ユーザーの持ち位置でテストする
- 電力測定:スリープ、起床スパイク、ラジオバースト、センサーサンプリングサイクルを測る。平均値だけの見積は誤解を生む
プロトタイプ→量産の落とし穴を避ける
よくある罠は部品の入手性、テストポイント不足(SWD、電源レール、センサー割り込み)、製造試験計画がないこと(プログラム、キャリブレーション、基本的なRF/センサチェック)。テストとキャリブレーションを念頭に設計するとバッチあたり数日を節約できます。
パイロット受入基準を定義する
事前にパイロットの合否基準を設定します:KPIs(バッテリ寿命、再接続時間、センサドリフト、誤報率)と、フィールドデータ計画(何をログし、どれくらいの頻度で回収するか)。こうするとフィードバックが判断材料になります。
適切なプラットフォームとセンサーを選ぶ方法(チェックリスト)
MCU/MPUプラットフォームとセンサーセットの選定は、ニーズを広く出し、制約で絞り、実検証で確かめる「ファネル」式がやりやすいです。
選定手順
- 要件(良好の定義)
測定可能な目標を定義します:検知範囲、精度、レイテンシ、サンプリングレート、動作温度、寿命、満たすべき規格など。
- 制約(変更できない条件)
BOMコスト、バッテリ寿命、PCB面積、筐体材料、利用可能インターフェース(I²C/SPI/CAN/Ethernet)、規制要件などのハードリミットを列挙します。
- ショートリスト(互換性のある組合せ)
インターフェースと電力予算に合うプラットフォーム+センサーの候補を2〜3セットに絞ります。ソフトウェアの話(ドライバ、ミドルウェア、リファレンス設計、融合をデバイスで行うかオフロードするか)も含める。
- プロトタイプテスト(早期検証)
簡易実験を行う:モーション/温度スイープ、振動試験、非公式のEMC、既知参照器との精度比較。消費電力は実際のデューティで測る。
よくある誤り
- センサーを過剰にスペックする:機械的取り付けやノイズのために精度を使い切れない場合に余計なコストを払う
- キャリブレーションを無視する:組立後や温度変化、経年で仕様が維持されると期待すること
- 更新戦略を過小評価する:ファームウェア更新、構成管理、現地診断の計画がない
簡単な意思決定マトリクス(テンプレート)
| Criterion | Option A | Option B | Notes |
|---|---|---|---|
| Cost (BOM + manufacturing) | Include test time and connectors | ||
| Power (active + sleep) | Use your real duty cycle | ||
| Accuracy & drift | Consider calibration effort | ||
| Compute headroom | Fusion, filtering, ML, safety margin | ||
| Connectivity fit | Bandwidth, latency, coexistence | ||
| Security & lifecycle | Secure boot, keys, updates |
(上表はテンプレートのまま挿入しています。実際の評価では各セルに数値や定性的評価を入れてください。)
次に取るべきアクションチェックリスト
- 合格/不合格テストを含む1ページの要件シートを書く
- 候補バンドルを2つ選び、両方でプロトタイプを作る
- 早期にキャリブレーションと機械的配置を検証する
- 製造前に誰が更新を担当するかを含め更新経路を定義する
- 結果をマトリクスに記録し、トレードオフを明示する
よくある質問
STMicroelectronicsの文脈で「組み込みプラットフォーム」とは何を指しますか?
組み込みプラットフォームは製品の再利用可能な基盤です:主要な演算デバイス(MCU/MPU)、電源やクロック、通信などの補助部品、開発ツール、リファレンス設計、ファームウェアライブラリを含みます。
一貫したプラットフォームファミリを使うことで、再設計リスクを減らし、プロトタイピングから量産までの速度を上げられます。
「センサーエコシステム」とは何で、なぜ重要ですか?
センサーエコシステムは単なる部品リスト以上のものです。ドライバ、サンプルコード、キャリブレーションガイダンス、そして生データを有用な出力(イベント、姿勢、メトリクス)に変えるためのアルゴリズム群を含みます。
これにより統合が速くなり、プロトタイプから量産へスケールするときの不意の問題が減ります。
STM32 MCUとSTM32MPx MPUのどちらを選べばよいですか?
次のような場合はMCU(例:STM32)を選びます:
- 高速起動と単一イメージでの簡素なファームウェア展開
- 制御ループ、モーター制御、センサ読み取りなどの予測可能なリアルタイム動作
- 低消費電力でシステムの複雑さが比較的低い
次のような場合はMPU(例:STM32MPxクラス)を選びます:
- Linuxやリッチなネットワーキングスタックが必要なとき
- 大量のデータ処理、ファイルシステム、リッチなUIを扱うとき
- アプリ風の機能を実現したいが、複雑さと消費電力が増えることを許容できるとき
どのペリフェラルがMCU/MPUの選択を左右することが多いですか?
多くの場合、CPU速度よりもペリフェラルのセットが選択を決めます。設計決定要因としてよく挙がるもの:
- ADC/DAC(チャンネル数、速度、精度)
- タイマ/PWMの要件(同期出力、モーター制御機能)
- 車載/産業用ネットワーク向けのCAN/LIN
- センサーやメモリ用のSPI/I²Cバス数と速度
- データ転送やファームウェア更新に関わるUSBの役割
「決定性(determinism)」とは何を意味し、どう設計すればよいですか?
リアルタイムとは「一貫した最悪時遅延」を意味します。設計の実践例:
- 時間クリティカルな作動にはハードウェアタイマ/PWMを使う
- サンプリングや安全反応を中心に割り込み優先度を構成する
- ログやUI、通信などの「非リアルタイム」作業が制御ループをブロックしないようにする
一般にMCUは決定論的動作への簡単な道で、MPUでも可能だがOSやドライバのチューニングが必要です。
MEMSセンサーとは何で、なぜ幅広く使われているのですか?
MEMS(マイクロ電気機械システム)はシリコン上に作られた微小な機械構造で、ICのようにパッケージされます。
コンパクトで低消費電力、量産性が高いため、ウェアラブル、スマートフォン、密集した産業ノード、車載センサーなどに広く使われています。
実製品でどのセンサー仕様が最も重要ですか?
実製品で重要なのはシステム動作に影響を与える仕様です:
- 範囲(Range):測定上限が低すぎると飽和し、高すぎると分解能が下がる
- ノイズ:静止時や低振幅振動の安定性に影響する
- ドリフト(ジャイロ等):長期精度と補正頻度に直結する
- 帯域/ODR:応答性や振動解析、消費電力に影響する
そして必ず機械的な取り付けやエンクロージャで実検証を行ってください。配置でデータシート差以上の違いが出ます。
センサフュージョンとは何で、いつ必要になりますか?
センサ融合は通常、加速度計+ジャイロ+磁気計(場合によっては気圧センサやGNSS)を組み合わせ、姿勢、動き、ステップ検出、振動深刻度、静止/移動判定などをより安定して意味のある形で出力します。
各センサーは単独では弱点があるため(ジャイロのドリフト、磁気干渉、加速度計の重力と動きの混同など)、融合はそれらを補います。
なぜセンサデータをそのままクラウドへ送らずエッジで処理するのですか?
エッジで処理すると帯域と電力を大幅に削減できます。tilt = 12°やイベント検出のような結果だけを送れば、毎秒何千サンプルも送る必要がありません。
また生データをデバイス内に留めることでプライバシーも向上します(集計値やイベントのみを送信)。
ブートからファームウェア更新まで、どんなセキュリティの基本を計画すべきですか?
セキュリティはライフサイクル全体で考える必要があります:
- セキュアブート:デバイスはファームウェアの認証を行ってから実行する
- 保護された鍵保管:鍵は抽出に強い領域(保護されたMCU領域やセキュアエレメント)に置く
- 署名付き(必要なら暗号化された)更新:ロールバック保護を含める
- プロビジョニングから廃棄までの計画(ID注入、資格情報の取り消し、データ消去)
脅威モデル、更新フロー、鍵管理、SBOM、パッチポリシーを文書化し、認証を謳うなら正式に取得済みであることを確認してください。