23 ਜੁਲਾ 2025·8 ਮਿੰਟ
STMicroelectronics ਪਲੇਟਫਾਰਮ ਅਤੇ ਸੈਂਸਰ: ਕਾਰਾਂ, IoT, ਉਦਯੋਗ
ਜਾਣੋ ਕਿ STMicroelectronics ਦੇ ਐਂਬੈੱਡਡ ਪਲੇਟਫਾਰਮ, MCUs ਅਤੇ ਸੈਂਸਰ ਇੱਕੋਸਿਸਟਮ ਆਟੋਮੋਟਿਵ ਸੁਰੱਖਿਆ, IoT ਉਤਪਾਦ ਅਤੇ ਉਦਯੋਗਿਕ ਕੰਟਰੋਲ ਸਿਸਟਮਾਂ ਲਈ ਕਿਵੇਂ ਸਹਾਇਕ ਹਨ।
ਜਾਣੋ ਕਿ STMicroelectronics ਦੇ ਐਂਬੈੱਡਡ ਪਲੇਟਫਾਰਮ, MCUs ਅਤੇ ਸੈਂਸਰ ਇੱਕੋਸਿਸਟਮ ਆਟੋਮੋਟਿਵ ਸੁਰੱਖਿਆ, IoT ਉਤਪਾਦ ਅਤੇ ਉਦਯੋਗਿਕ ਕੰਟਰੋਲ ਸਿਸਟਮਾਂ ਲਈ ਕਿਵੇਂ ਸਹਾਇਕ ਹਨ।
ਇੱਕ ਐਂਬੈੱਡਡ ਪਲੇਟਫਾਰਮ ਉਹ "ਭਾਗਾਂ ਦਾ ਕਿੱਟ" ਹੁੰਦਾ ਹੈ ਜਿਸ ਦੇ ਆਸ-ਪਾਸ ਤੁਸੀਂ ਇੱਕ ਇਲੈਕਟ੍ਰੌਨਿਕ ਉਤਪਾਦ ਬਣਾਉਂਦੇ ਹੋ। ਇਸ ਵਿੱਚ ਆਮ ਤੌਰ 'ਤੇ ਇੱਕ ਮੁੱਖ ਚਿਪ (ਮਾਈਕ੍ਰੋਕੰਟਰੋਲਰ ਜਾਂ ਪ੍ਰੋਸੈਸਰ), ਸਹਾਇਕ ਕੰਪੋਨੈਂਟ (ਪਾਵਰ, ਕਲਾਕ, ਕਨੈਕਟਿਵਿਟੀ), ਰੈਫਰੈਂਸ ਡਿਜ਼ਾਈਨ ਅਤੇ ਸੋਫਟਵੇਅਰ ਟੂਲ/ਲਾਇਬ੍ਰੇਰੀਆਂ ਸ਼ਾਮਿਲ ਹੁੰਦੀ ਹਾਂ ਜੋ ਵਿਚਾਰ ਤੋਂ ਕੰਮ ਕਰਦਿਆਂ ਡਿਵਾਈਸ ਤੱਕ ਲਿਜਾਣ ਵਿੱਚ ਸਹਾਇਤਾ ਕਰਦੀਆਂ ਹਨ।
ਇੱਕ ਸੈਂਸਰ ਇੱਕੋਸਿਸਟਮ ਉਹ ਮਿਲਦਾ-ਜੁਲਦਾ ਸੈੱਟ ਹੁੰਦਾ ਹੈ—ਮੋਸ਼ਨ, ਦਬਾਅ, ਤਾਪਮਾਨ ਆਦਿ—ਨਾਲ ਹੀ ਡਰਾਈਵਰ, ਕੈਲੀਬ੍ਰੇਸ਼ਨ ਗਾਈਡ, ਉਦਾਹਰਣ ਕੋਡ ਅਤੇ ਕਈ ਵਾਰ ਤਿਆਰ ਕੀਤੇ ਅਲਗੋਰਿਦਮ ਹੁੰਦੇ ਹਨ ਜੋ ਕੱਚੇ ਪੜਤਾਲਾਂ ਨੂੰ ਵਰਤੋਂ ਯੋਗ ਜਾਣਕਾਰੀ ਵਿੱਚ ਬਦਲਦੇ ਹਨ।
ਪਲੇਟਫਾਰਮ ਇਸ ਲਈ ਮਹੱਤਵਪੂਰਨ ਹਨ ਕਿਉਂਕਿ ਇਹ ਟੀਮਾਂ ਨੂੰ ਪ੍ਰਮਾਣਿਤ ਬਣਾਉਂਦੇ ਹਿੱਸਿਆਂ ਨੂੰ ਦੁਹਰਾਉਣ ਦੀ ਆਜ਼ਾਦੀ ਦਿੰਦੇ ਹਨ, ਹਰ ਵਾਰੀ ਬੁਨਿਆਦੀ ਚੀਜ਼ਾਂ ਨੂੰ ਦੁਬਾਰਾ ਸੋਚਣ ਦੀ ਥਾਂ।
ਜਦੋਂ ਤੁਸੀਂ ਇੱਕ ਵਧੀਆ ਸਪੋਰਟ ਕੀਤੀ ਪਲੇਟਫਾਰਮ ਪਰਿਵਾਰ ਦੇ ਅੰਦਰ ਰਹਿੰਦੇ ਹੋ, ਤਾਂ ਆਮ ਤੌਰ 'ਤੇ ਤੁਹਾਨੂੰ ਮਿਲਦਾ ਹੈ:
STMicroelectronics ਸੰਦਰਭ ਵਿੱਚ, “ਪਲੇਟਫਾਰਮ” ਅਕਸਰ STM32 (MCUs), STM32MPx (MPUs), ਕਨੈਕਟਿਵਿਟੀ ਚਿਪ/ਮੌਡੀਊਲ, ਪਾਵਰ ਹੱਲ ਅਤੇ ਡਿਵੈਲਪਮੈਂਟ ਟੂਲਜ਼ ਦੇ ਮਿਲਾਪ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ, ਜਦਕਿ ਸੈਂਸਰ ਇੱਕੋਸਿਸਟਮ ਵਿੱਚ ਆਮ ਤੌਰ 'ਤੇ ST MEMS sensors ਅਤੇ ਮੋਸ਼ਨ ਪ੍ਰੋਸੈਸਿੰਗ ਅਤੇ ਵਾਤਾਵਰਣ ਮਾਪਣ ਲਈ ਸਹਾਇਕ ਸੌਫਟਵੇਅਰ ਸ਼ਾਮਿਲ ਹੁੰਦਾ ਹੈ।
ਇਹ ਲੇਖ ਆਮ ST ਬਿਲਡਿੰਗ ਬਲਾਕ ਤੇ ਧਿਆਨ ਕੇਂਦਰਿਤ ਕਰਦਾ ਹੈ ਅਤੇ ਦਿਖਾਂਦਾ ਹੈ ਕਿ ਇਹ ਕਿਵੇਂ ਅਸਲ ਉਤਪਾਦਾਂ ਵਿੱਚ ਇਕੱਠੇ ਹੁੰਦੇ ਹਨ: ਕਮਪਿਊਟ (MCU/MPU), ਸੈਂਸਿੰਗ (MEMS ਅਤੇ ਵਾਤਾਵਰਣਿਕ), ਕਨੈਕਟਿਵਿਟੀ, ਪਾਵਰ ਅਤੇ ਸੁਰੱਖਿਆ। ਲਕੜੀ ਨਹੀਂ ਇਹ ਕਿ ਹਰ ਪਾਰਟ ਨੰਬਰ ਦੀ सूची ਦਿੱਤੀ ਜਾਵੇ, ਬਲਕਿ ਇਹ ਸਮਝਣ ਵਿੱਚ ਮਦਦ ਕਰਨ ਲਈ ਹੈ ਕਿ ਅਨੁਕੂਲ ਕੰਪੋਨੈਂਟ ਚੁਣਦੇ ਸਮੇਂ "ਸਿਸਟਮ ਸੋਚ" ਕਿਵੇਂ ਵਰਤੀ ਜਾਵੇ।
ਇਨ੍ਹਾਂ ਤਿੰਨ ਡੋਮੇਨ ਨੂੰ ਧਿਆਨ ਵਿੱਚ ਰੱਖਦੇ ਹੋਏ, ਬਾਕੀ ਭਾਗ ਦਿਖਾਉਂਦੇ ਹਨ ਕਿ ST ਦਾ ਪਲੇਟਫਾਰਮ ਅਭਿਗਮ ਤੁਹਾਨੂੰ ਐਸੇ ਸਿਸਟਮ ਬਣਾਉਣ ਵਿੱਚ ਕਿਵੇਂ ਮਦਦ ਕਰਦਾ ਹੈ ਜੋ ਬਣਾਉਣ, ਪ੍ਰਮਾਣਿਤ ਕਰਨ ਅਤੇ ਕਾਇਮ ਰੱਖਣ ਵਿੱਚ ਆਸਾਨ ਹਨ।
ਜਦ ਲੋਕ "ST ਪਲੇਟਫਾਰਮ" ਦੀ ਗੱਲ ਕਰਦੇ ਹਨ, ਉਹ ਆਮ ਤੌਰ 'ਤੇ ਇੱਕ ਕਮਪਿਊਟ ਕੋਰ (MCU ਜਾਂ MPU) ਅਤੇ ਉਹ ਪੈਰੀਫਰੇਲ ਅਤੇ ਸਾਫਟਵੇਅਰ ਸਹਾਇਤਾ ਦੱਸਦੇ ਹਨ ਜੋ ਸਾਰੀ ਡਿਵਾਈਸ ਨੂੰ ਵਰਤਣਯੋਗ ਬਣਾਉਂਦੇ ਹਨ। ਪਹਿਲੇ ਚੋਣ ਕਰਨ ਨਾਲ ਬਾਅਦ ਵਿੱਚ ਦੁਖਦਾਇਕ ਰੀਡਿਜ਼ਾਈਨ ਤੋਂ ਬਚਿਆ ਜਾ ਸਕਦਾ ਹੈ—ਖਾਸ ਕਰਕੇ ਜਦੋਂ ਸੈਂਸਰ, ਕਨੈਕਟਿਵਿਟੀ ਅਤੇ ਰੀਅਲ-ਟਾਈਮ ਵਿਹਾਰ ਸ਼ਾਮਿਲ ਹੋ।
ਮਾਈਕ੍ਰੋਕੰਟਰੋਲਰ (MCUs)—ਉਦਾਹਰਣ ਲਈ ਕਈ STM32 ਪਰਿਵਾਰ—ਕੰਟਰੋਲ ਲੂਪ, ਸੈਂਸਰ ਪੜ੍ਹਨਾ, ਮੋਟਰ ਚਲਾਉਣਾ, ਸਧਾਰਨ ਯੂਜ਼ਰ ਇੰਟਰਫੇਸ ਸੰਭਾਲਣਾ ਅਤੇ ਆਮ ਕਨੈਕਟਿਵਿਟੀ (BLE/Wi‑Fi ਮੌਡੀਊਲ, CAN ਟ੍ਰਾਂਸਸੀਵਰ ਆਦਿ) ਲਈ ਵਧੀਆ ਹੁੰਦੇ ਹਨ। ਇਹ ਆਮ ਤੌਰ 'ਤੇ ਤੇਜ਼ ਬੂਟ ਹੁੰਦੇ ਹਨ, ਇਕ ਮੁੱਖ ਫਰਮਵੇਅਰ ਇਮੇਜ ਚਲਾਉਂਦੇ ਹਨ ਅਤੇ ਪੇਸ਼ਗੋਈਯੋਗ ਟਾਈਮਿੰਗ 'ਚ ਮਾਹਿਰ ਹੁੰਦੇ ਹਨ।
ਮਾਈਕ੍ਰੋਪ੍ਰੋਸੈਸਰ (MPUs)—ਜਿਵੇਂ STM32MP1-ਕਲਾਸ ਡਿਵਾਈਸ—ਉਸ ਸਮੇਂ ਵਰਤੇ ਜਾਂਦੇ ਹਨ ਜਦੋਂ ਤੁਹਾਨੂੰ ਵੱਧ ਡਾਟਾ ਪ੍ਰੋਸੈਸਿੰਗ, ਰੀਚ ਗ੍ਰਾਫਿਕ UI ਜਾਂ Linux-ਅਧਾਰਿਤ ਨੈਟਵਰਕ ਸਟੈਕ ਦੀ ਲੋੜ ਹੋਵੇ। ਇਹ "ਐਪ-ਜੈਸੀ" ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ (web UI, ਲੌਗਿੰਗ, ਫਾਇਲ ਸਿਸਟਮ) ਸੌਖੇ ਬਣਾਉਂਦੇ ਹਨ, ਪਰ ਆਮ ਤੌਰ 'ਤੇ ਪਾਵਰ ਅਤੇ ਸੋਫਟਵੇਅਰ ਜਟਿਲਤਾ ਵਧ ਜਾਂਦੀ ਹੈ।
ਕੋਰ ਸਿਰਫ਼ ਕਹਾਣੀ ਦਾ ਅੱਧਾ ਹਿੱਸਾ ਹੈ; ਪੈਰੀਫਰੇਲ ਸੈੱਟ ਅਕਸਰ ਚੋਣ ਨੂੰ ਨਾਰੋ ਕਰ ਦਿੰਦਾ ਹੈ:
ਜੇ ਤੁਹਾਡੇ ਡਿਜ਼ਾਈਨ ਨੂੰ ਕਈ ਹਾਈ-ਸਪੀਡ SPI ਬੱਸ, ਸਮਕਾਲੀ PWM, ਜਾਂ ਕੋਈ ਖਾਸ CAN ਫੀਚਰ ਚਾਹੀਦਾ ਹੈ, ਤਾਂ ਇਹ CPU ਸਪੀਡ ਤੋਂ ਜ਼ਿਆਦਾ ਤੇਜ਼ੀ ਨਾਲ ਵਿਕਲਪ ਘਟਾ ਸਕਦਾ ਹੈ।
ਰੀਅਲ-ਟਾਈਮ ਸਿਰਫ਼ "ਤੇਜ਼" ਨਹੀਂ ਹੁੰਦਾ—ਇਹ ਲਗਾਤਾਰ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ। ਕੰਟਰੋਲ ਸਿਸਟਮWorst-case ਲੈਟੈਂਸੀ, ਇੰਟਰਪਟ ਹੈਂਡਲਿੰਗ ਅਤੇ ਇਹ ਦੇਖਣ ਵਿੱਚ ਰੁਚੀ ਰੱਖਦੇ ਹਨ ਕਿ ਸੈਂਸਰ ਪੜ੍ਹਾਈਆਂ ਅਤੇ ਐਕਚੁਏਟਰ ਆਉਟਪੁੱਟ ਸਮੇਂ 'ਤੇ ਹੁੰਦੇ ਹਨ ਜਾਂ ਨਹੀਂ। ਚੰਗੇ ਇੰਟਰਪਟ ਅਤੇ ਟਾਈਮਰ ਵਾਲੇ MCUs ਆਮ ਤੌਰ 'ਤੇ ਨਿਰਧਾਰਿਤਤਾ ਲਈ ਸਭ ਤੋਂ ਸਧਾਰਣ ਰਸਤਾ ਹੁੰਦੇ ਹਨ; MPUs ਵੀ ਇਹ ਕਰ ਸਕਦੇ ਹਨ, ਪਰ ਆਮ ਤੌਰ 'ਤੇ ਇਨ੍ਹਾਂ ਨੂੰ OS ਅਤੇ ਡਰਾਇਵਰ ਦੀ ਬਾਰੀਕੀ ਨਾਲ ਸੁਧਾਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ।
ਉੱਚ-ਅੰਤ ਪ੍ਰੋਸੈਸਰ ਬਾਹਰੀ ਚਿਪਾਂ ਨੂੰ ਘਟਾ ਸਕਦਾ ਹੈ (ਕੰਪੈਨਿਅਨ ICs ਘੱਟ) ਜਾਂ ਰਿੱਚਰ ਫੀਚਰ ਸਹਾਇਤ ਕਰ ਸਕਦਾ ਹੈ, ਪਰ ਇਹ ਪਾਵਰ ਬਜਟ, ਥਰਮਲ ਪਾਬੰਦੀਆਂ ਅਤੇ ਫਰਮਵੇਅਰ ਕੋਸ਼ਿਸ਼ (ਬੂਟ ਚੇਨ, ਡਰਾਇਵਰ, ਸੁਰੱਖਿਆ ਅਪਡੇਟ) ਵਧਾ ਸਕਦਾ ਹੈ। ਸਧਾਰਨ MCU BOM ਅਤੇ ਪਾਵਰ ਘਟਾ ਸਕਦਾ ਹੈ, ਪਰ ਸੰਭਵਤ: ਫਰਮਵੇਅਰ ਅਪਟਿਮਾਈਜ਼ੇਸ਼ਨ ਜਾਂ ਸਮਰਪਿਤ ਐਕਸੀਲੇਰੇਟਰ/ਪੈਰੀਫਰੇਲਜ਼ ਵਿੱਚ ਜਟਿਲਤਾ ਦਬਾ ਸਕਦਾ ਹੈ।
STMicroelectronics ਦਾ ਸੈਂਸਰ ਲਾਈਨਅੱਪ ਇਤਨਾ ਵਿਸਤ੍ਰਿਤ ਹੈ ਕਿ ਤੁਸੀਂ ਸਮਾਰਟਵਾਚ ਤੋਂ ਲੈ ਕੇ ਵਾਹਨ ਸਥਿਰਤਾ ਸਿਸਟਮ ਤੱਕ ਬਿਨਾਂ ਵੈਂਡਰ ਬਦਲੇ ਬਣਾ ਸਕਦੇ ਹੋ। ਵਾਸਤਵਿਕ ਮੁੱਲ ਸਾਦਗੀ ਹੈ: ਇੱਕੋ ਜਿਹੇ ਇਲੈਕਟ੍ਰਿਕਲ ਇੰਟਰਫੇਸ, ਸੌਫਟਵੇਅਰ ਸਹਾਇਤਾ ਅਤੇ ਲੰਬੇ ਸਮੇਂ ਦੀ ਉਪਲਬਧਤਾ—ਖਾਸ ਕਰਕੇ ਜਦੋਂ ਉਤਪਾਦ ਪ੍ਰੋਟੋਟਾਈਪ ਤੋਂ ਵੋਲਿਊਮ ਵਿੱਚ ਸਕੇਲ ਕਰਦੇ ਹਨ।
ਅਧਿਕANS Embedded ਉਤਪਾਦ küçük ਇੱਕ ਛੋਟਾ ਸੈੱਟ "ਵਰਕਹੋਰਸ" ਸੈਂਸਰ ਨਾਲ ਸ਼ੁਰੂ ਹੁੰਦੇ ਹਨ:
MEMS ਦਾ ਪੂਰਾ ਰੂਪ micro-electro-mechanical systems ਹੈ: ਛੋਟੇ ਤਕਨੀਕੀ ਮਿਕੈਨਿਕਲ ਢਾਂਚੇ ਜੋ ਆਮ ਤੌਰ 'ਤੇ ਸਿਲਿਕਾਨ ਉੱਤੇ ਨਿਰਮਿਤ ਹੁੰਦੇ ਹਨ ਅਤੇ ਆਮ ਤੌਰ 'ਤੇ ਇੱਕ IC ਵਾਂਗ ਪੈਕੇਜ ਕੀਤੇ ਜਾਂਦੇ ਹਨ। MEMS ਛੋਟੇ, ਘੱਟ-ਪਾਵਰ ਅਤੇ ਮਾਸ-ਉਤਪਾਦਨ-ਯੋਗ ਦੰਦਾਂ ਕਰਕੇ ਫੋਨ, ਇਅਰਬਡਜ਼, ਵੇਅਰਏਬਲ ਅਤੇ ਘਣ ਉદ્યોગਿਕ ਨੋਡ ਵਿੱਚ ਵਿਆਪਕ ਹਨ।
ਟੀਮਾਂ ਆਮ ਤੌਰ 'ਤੇ ਅਗਲੇ ਪੈਰਾਮੀਟਰ ਦੀ ਤੁਲਨਾ ਕਰਦੀਆਂ ਹਨ:
ਚੰਗੇ ਵਿਸ਼ੇਸ਼ਣਾਂ ਦਾ ਮੁੱਲ ਜ਼ਿਆਦਾ ਹੋ ਸਕਦਾ ਹੈ ਅਤੇ ਇਹ ਜ਼ਿਆਦਾ ਪਾਵਰ ਲੈਂਦੇ ਹਨ, ਪਰ ਮਕੈਨਿਕਲ ਪਲੇਸਮੈਂਟ ਵੀ ਬਰਾਬਰ ਮਹੱਤਵਪੂਰਨ ਹੋ ਸਕਦਾ ਹੈ। ਉਦਾਹਰਨ ਲਈ, ਇੱਕ IMU ਜੋ ਘੁੰਮਣ ਦੇ ਕੇਂਦਰ ਤੋਂ ਦੂਰ ਲਗਾਇਆ ਗਿਆ ਹੈ ਜਾਂ ਇੱਕ ਕੰਪਨ ਵਾਲੇ ਮੋਟਰ ਦੇ ਨੇੜੇ ਹੋਵੇ ਤਾਂ ਫਿਲਟਰਿੰਗ ਅਤੇ ਬੋਰਡ ਡਿਜ਼ਾਈਨ ਦੀ ਲੋੜ ਪੈ ਸਕਦੀ ਹੈ। ਛੋਟੇ ਡਿਵਾਈਸਾਂ ਵਿਚ, ਤੁਸੀਂ ਅਕਸਰ ਘੱਟ-ਪਾਵਰ ਸੈਂਸਰ ਚੁਣਦੇ ਹੋ ਅਤੇ ਪਲੇਸਮੈਂਟ, ਕੈਲੀਬ੍ਰੇਸ਼ਨ ਅਤੇ ਫਰਮਵੇਅਰ ਸਮੂਥਿੰਗ 'ਤੇ ਨਿਵੇਸ਼ ਕਰਦੇ ਹੋ ਤਾਂ ਜੋ ਉਪਭੋਗਤਾ ਅਨੁਭਵ ਟਾਰਗੇਟ ਨੂੰ ਪਾਇਆ ਜਾ ਸਕੇ।
ਕੱਚੇ ਸੈਂਸਰ ਸਿਗਨਲ ਸ਼ੋਰ, ਬਾਇਅਸ ਅਤੇ ਅਕਸਰ ਇਕੱਲੇ ਗੁੰਝਲਦਾਰ ਹੁੰਦੇ ਹਨ। ਸੈਂਸਰ ਫਿਊਜ਼ਨ ਅਕਸਰ ਇੱਕਸਾਥਈਲ accelerometer, gyroscope, magnetometer, pressure sensor ਅਤੇ ਕਈ ਵਾਰ GNSS ਦੇ ਪੜਤਾਲਾਂ ਨੂੰ ਇਕੱਠਾ ਕਰਕੇ ਇੱਕ ਸਾਫ਼, ਜ਼ਿਆਦਾ ਵਰਤੋਂਯੋਗ ਅੰਦਾਜ਼ ਪੈਦਾ ਕਰਦੀ ਹੈ: ਦਿਸ਼ਾ, ਮੋਸ਼ਨ, ਕਦਮ, ਕੰਪਨ ਦੀ ਗੰਭੀਰਤਾ ਜਾਂ "ਸਥਿਰ/ਚਲਦਾ" ਫੈਸਲਾ।
ਇੱਕ MEMS accelerometer ਤੁਹਾਨੂੰ ਤਬਦੀਲੀ ਦਾ ਪਤਾ ਦਿੰਦਾ ਹੈ, ਪਰ ਇਹ ਗ੍ਰੈਵਿਟੀ ਨੂੰ ਤੇਜ਼ ਮੋਸ਼ਨ ਤੋਂ ਵੱਖ ਨਹੀਂ ਕਰ ਸਕਦਾ। ਗਾਇਰੋ ਨਰਮ ਰੋਟੇਸ਼ਨ ਟਰੈਕ ਕਰਦਾ ਹੈ, ਪਰ ਇਸ ਦੀ ਅਨੁਮਾਨ ਲੰਬੇ ਸਮੇਂ ਵਿੱਚ ਡ੍ਰਿਫਟ ਕਰਦੀ ਹੈ। ਮੈਗਨੇਟੋਮੀਟਰ ਲੰਬੇ ਸਮੇਂ ਦੇ ਹੈੱਡਿੰਗ ਡ੍ਰਿਫਟ ਨੂੰ ਸਹੀ ਕਰ ਸਕਦਾ ਹੈ, ਪਰ ਨੇੜਲੇ ਧਾਤਾਂ ਜਾਂ ਮੋਟਰਾਂ ਤੋਂ ਪ੍ਰਭਾਵਿਤ ਹੋ ਸਕਦਾ ਹੈ। ਫਿਊਜ਼ਨ ਅਲਗੋਰਿਦਮ ਇਨ੍ਹਾਂ ਦੀਆਂ ਤਾਕਤਾਂ ਅਤੇ ਕਮਜ਼ੋਰੀਆਂ ਨੂੰ ਸੰਤੁਲਿਤ ਕਰਦੇ ਹਨ ਤਾਂ ਜੋ ਸਥਿਰ ਨਤੀਜੇ ਮਿਲ ਸਕਣ।
ਐਜ 'ਤੇ ਫਿਊਜ਼ਨ ਚਲਾਉਣ ਨਾਲ ਬੈਂਡਵਿਥ ਨਾ ਕੇਵਲ ਘੱਟ ਹੁੰਦੀ ਹੈ, ਸਗੋਂ ਨਿੱਜਤਾ ਵੀ ਸੁਧਰਦੀ ਹੈ: ਤੁਸੀਂ ਹਜ਼ਾਰਾਂ ਸੈਂਪਲਾਂ ਦੀ ਥਾਂ "tilt = 12°" ਭੇਜ ਸਕਦੇ ਹੋ। ਇਹ ਡਿਵਾਈਸ ਭੀਤਰ ਰਾ ਟਰੇਸ ਰੱਖ ਸਕਦਾ ਹੈ ਅਤੇ ਕੇਵਲ ਘਟਨਾ/ਸੰਗ੍ਰਹਿਤ ਮੈਟਰਿਕ ਭੇਜੇ ਜਾਂਦੇ ਹਨ।
ਭਰੋਸੇਯੋਗ ਫਿਊਜ਼ਨ ਕੈਲੀਬ੍ਰੇਸ਼ਨ (offsets, scale factors, alignment) ਅਤੇ ਫਿਲਟਰਿੰਗ (low-pass/high-pass, ਆਊਟਲਾਇਅਰ ਰੀਜੈਕਸ਼ਨ, ਤਾਪਮਾਨ ਮੁਆਵਜ਼ਾ) 'ਤੇ ਨਿਰਭਰ ਕਰਦੀ ਹੈ। ਅਸਲ ਉਤਪਾਦਾਂ ਵਿੱਚ ਤੁਸੀਂ ਮੈਗਨੈਟਿਕ ਹਸਤਕਸ਼ੇਪ, ਮਾਊਂਟਿੰਗ ਓਰੀਐਂਟੇਸ਼ਨ ਬਦਲਾਅ ਅਤੇ ਨਿਰਮਾਣ ਵਿਭਿੰਨਤਾ ਲਈ ਯੋਜਨਾ ਬਣਾਉਂਦੇ ਹੋ—ਨਾਹ ਤਾਂ ਇਕੋ ਜਿਹਾ ਡਿਵਾਈਸ ਯੂਨਿਟ-ਟੂ-ਯੂਨਿਟ ਵੱਖਰਾ ਵਿਹਾਰ ਕਰ ਸਕਦਾ ਹੈ।
ਕਾਰਾਂ ਇਕ ਵਿਸ਼ੇਸ਼ ਐਂਬੈੱਡਡ ਮਾਹੌਲ ਹਨ: ਬਿਜਲੀਕ ਖਰਾਬੀ ਹੋ ਸਕਦੀ ਹੈ, ਤਾਪਮਾਨ ਵਿਆਪਕ ਘੁੰਮਦਾ ਹੈ, ਅਤੇ ਉਮੀਦ ਕੀਤੀ ਜਾਂਦੀ ਹੈ ਕਿ ਇਹ ਸਾਲਾਂ ਤੱਕ ਸਥਿਰ ਤਰੀਕੇ ਨਾਲ ਕੰਮ ਕਰੇ। ਇਸੀ ਲਈ ਆਟੋਮੋਟਿਵ-ਕੇਂਦਰਤ MCUs, ਸੈਂਸਰ ਅਤੇ ਪਾਵਰ ਕੰਪੋਨੈਂਟਾਂ ਨੂੰ ਅਕਸਰ ਉਨ੍ਹਾਂ ਦੀ ਯੋਗਤਾਵਾਂ, ਦਸਤਾਵੇਜ਼ੀ ਕਰਨ ਅਤੇ ਲੰਬੀ ਅਵੈਲੈਬਿਲਟੀ ਕਿਸਮ ਦੀਆਂ ਬਿਲਕੁਲ ਗੁਣਵੱਤਾਵਾਂ ਲਈ ਚੁਣਿਆ ਜਾਂਦਾ ਹੈ—ਸਿਰਫ਼ ਕੁਦਰਤੀ ਕਾਰਗੁਜ਼ਾਰੀ ਲਈ ਨਹੀਂ।
STMicroelectronics ਪਲੇਟਫਾਰਮ ਅਕਸਰ ਵਾਹਨ ਦੇ ਕਈ "ਜ਼ੋਨ" ਵਿੱਚ ਮਿਲਦੇ ਹਨ:
ਜ਼ਿਆਦातर ਆਟੋਮੋਟਿਵ ECUs ਅਕੇਲੇ ਕੰਮ ਨਹੀਂ ਕਰਦੇ—ਉਹ ਇਨ-ਵਾਹੀਕਲ ਨੈਟਵਰਕਾਂ ਰਾਹੀਂ ਗੱਲਬਾਤ ਕਰਦੇ ਹਨ:
MCU ਲਈ ਬਿਲਟ-ਇਨ CAN/LIN ਸਹਾਇਤਾ (ਜਾਂ ਟ੍ਰਾਂਸਸੀਵਰ ਨਾਲ ਆਸਾਨ ਜੋੜ) ਨਾ ਸਿਰਫ਼ ਵਾਇਰਿੰਗ ਅਤੇ ਲਾਗਤ 'ਤੇ ਅਸਰ ਪਾਉਂਦੀ ਹੈ, ਬਲਕਿ ਟਾਈਮਿੰਗ ਵਿਹਾਰ ਅਤੇ ECU ਦੇ ਵਾਹਨ ਵਿੱਚ ਕਿਵੇਂ ਇੰਟੈਗਰੇਟ ਹੁੰਦੇ ਹਨ 'ਤੇ ਵੀ ਪ੍ਰਭਾਵ ਪਾਉਂਦੀ ਹੈ।
ਆਟੋਮੋਟਿਵ ਡਿਜ਼ਾਈਨ ਨੂੰ ਤਾਪਮਾਨ ਰੇਂਜ, EMI/EMC ਪ੍ਰਭਾਵ ਅਤੇ ਲੰਬੀ ਸਰਵਿਸ ਲਾਈਫ ਸਹਿਣਾ ਪੈਦਾ ਹੈ। ਅਲੱਗ ਤੋਂ, ਫੰਕਸ਼ਨਲ ਸੁਰੱਖਿਆ ਇੱਕ ਵਿਕਾਸ ਦਿਸ਼ਾ-ਰੇਖਾ ਹੈ: ਇਹ ਡੀਸਿਪਲਿਨਡ ਮੰਗਾਂ, ਵਿਸ਼ਲੇਸ਼ਣ, ਟੈਸਟ ਅਤੇ ਟੂਲ ਸਹਾਇਤਾ 'ਤੇ ਜ਼ੋਰ ਦਿੰਦੀ ਹੈ ਤਾਂ ਕਿ ਸੁਰੱਖਿਆ-ਸਬੰਧੀ ਫੰਕਸ਼ਨ ਵਿਵਸਥਿਤ ਢੰਗ ਨਾਲ ਇੰਜੀਨੀਅਰ ਕੀਤੇ ਅਤੇ ਪ੍ਰਮਾਣਿਤ ਹੋਣ। ਜੇਕਰ ਤੁਹਾਡੀ ਵਿਸ਼ੇਸ਼ਤਾ "ਸੁਰੱਖਿਆ-ਕ੍ਰਿਟੀਕਲ" ਨਾ ਵੀ ਹੋਵੇ, ਤਾਂ ਇਸ ਦਿਸ਼ਾ-ਰੇਖਾ ਦੇ ਕੁਝ ਹਿੱਸੇ ਅਪਣਾਉਣ ਨਾਲ ਆਖਰੀ-ਚਰਣ ਦੀਆਂ ਹੈਰਾਨੀ ਅਤੇ ਮੁੜਕੰਮ ਘਟ ਸਕਦੇ ਹਨ।
ਅਧਿਕANS IoT ਉਤਪਾਦ "ਬੇਟਰੀ ਲਾਈਫ, ਜਥੇਬੰਦੀ ਦਾ ਆਕਾਰ, ਅਤੇ ਉਪਭੋਗਤਾ ਲਈ ਜ਼ਿੰਦਾ ਮਹਿਸੂਸ" ਵਰਗੀਆਂ ਗੈਰ-ਚੰਚਲ ਗਰੰਭੀਆਂ 'ਤੇ ਨਿਰਭਰ ਹਨ। STMicroelectronics ਪਲੇਟਫਾਰਮ ਅਤੇ ਸੈਂਸਰ ਇੱਕੋਸਿਸਟਮ ਇੱਥੇ ਇਸ ਲਈ ਚੁਣੇ ਜਾਂਦੇ ਹਨ ਕਿਉਂਕਿ ਇਹ ਟੀਮਾਂ ਨੂੰ ਸੈਂਸਿੰਗ ਸਹੀਤਾ, ਲੋਕਲ ਕਮਪਿਊਟ ਅਤੇ ਕਨੈਕਟਿਵਿਟੀ ਨੂੰ ਬਿਨਾਂ ਹਿੱਸਾ-ਵਧਾਉਂਦੇ ਸੰਤੁਲਨ ਕਰਨ ਦਿੰਦੇ ਹਨ।
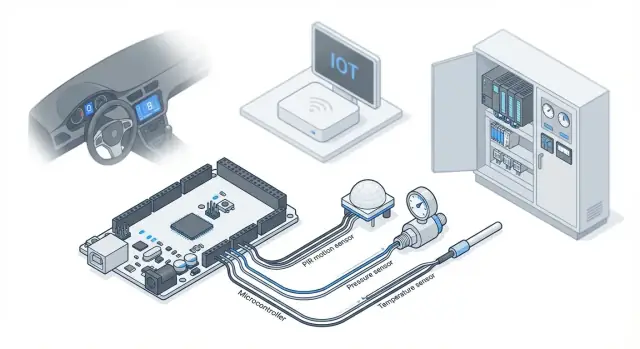
ਇੱਕ ਵਿਆਵਹਾਰਿਕ IoT ਪਾਈਪਲਾਈਨ ਆਮ ਤੌਰ 'ਤੇ ਇਸ ਤਰ੍ਹਾਂ ਹੁੰਦੀ ਹੈ: sensing → local compute → connectivity → cloud/app।
ਸੈਂਸਰ (ਮੋਸ਼ਨ, ਦਬਾਅ, ਤਾਪਮਾਨ, ਬਾਇਓ ਸਿੰਕ) ਕੱਚਾ ਡੇਟਾ ਪੈਦਾ ਕਰਦੇ ਹਨ। ਇੱਕ ਘੱਟ-ਪਾਵਰ MCU ਫਿਲਟਰਿੰਗ, ਥਰੈਸ਼ਹੋਲਡ ਅਤੇ ਸਧਾਰਨ ਫੈਸਲੇ ਕਰਦਾ ਹੈ ਤਾਂ ਕਿ ਰੇਡੀਓ ਸਿਰਫ਼ ਜ਼ਰੂਰੀ ਸਮੇਂ ਭੇਜੇ। ਕਨੈਕਟਿਵਿਟੀ (Bluetooth LE, Wi‑Fi, sub‑GHz, ਸੈੱਲੁਲਰ ਜਾਂ LoRa) ਫਿਰ ਚੁਣੇ ਹੋਏ ਡੇਟਾ ਨੂੰ ਫੋਨ ਜਾਂ ਗੇਟਵੇਅ ਵਿੱਚ ਭੇਜਦੀ ਹੈ, ਜੋ ਇਸ ਨੂੰ ਐਪ ਜਾਂ ਕਲਾਉਡ ਸੇਵਾ ਲਈ ਅੱਗੇ ਭੇਜਦਾ ਹੈ।
ਮੁੱਖ ਵਿਚਾਰ: ਜਿੰਨਾ ਜ਼ਿਆਦਾ ਤੁਸੀਂ ਲੋਕਲ ਤੌਰ 'ਤੇ ਫੈਸਲੇ ਕਰ ਸਕਦੇ ਹੋ, ਉਤਨੀ ਹੀ ਛੋਟੀ ਬੈਟਰੀ ਅਤੇ ਸਸਤਾ ਕਨੈਕਟਿਵਿਟੀ ਲੋੜਦੀ ਹੈ।
ਬੈਟਰੀ ਦੀ ਉਮਰ ਆਮ ਤੌਰ 'ਤੇ ਪੀਕ ਕਰੰਟ ਬਾਰੇ ਨਹੀਂ ਹੁੰਦੀ; ਇਹ ਇਸ ਗੱਲ ਬਾਰੇ ਹੁੰਦੀ ਹੈ ਕਿ ਡਿਵਾਈਸ ਕਿੰਨਾ ਸਮਾਂ ਸਲੀਪ ਵਿੱਚ ਰਹਿੰਦਾ ਹੈ। ਚੰਗੇ ਡਿਜ਼ਾਈਨ ਇੱਕ ਬਜਟ ਨਾਲ ਸ਼ੁਰੂ ਹੁੰਦੇ ਹਨ: ਦਿਨ ਵਿੱਚ ਡਿਵਾਈਸ ਕਿੰਨੀ ਮਿੰਟ ਜਾਗਦਾ, ਸੈਂਪਲ ਕਰਦਾ, ਪ੍ਰੋਸੈਸ ਕਰਦਾ ਅਤੇ ਟਰਾਂਸਮਿਟ ਕਰਦਾ ਹੈ?
ਇਹ ਥਾਂ ਹੈ ਜਿੱਥੇ ਸੈਂਸਰ ਫੀਚਰ MCU ਦੇ ਬਰਾਬਰ ਮਹੱਤਵਪੂਰਨ ਹੁੰਦੇ ਹਨ: ਇੱਕ ਸੈਂਸਰ ਜੋ ਖੁਦ ਹੀ ਇਕ ਘਟਨਾ ਨੂੰ ਪਛਾਣ ਸਕਦਾ ਹੈ ਉਹ ਮੁੱਖ ਪ੍ਰੋਸੈਸਰ ਅਤੇ ਰੇਡੀਓ ਨੂੰ ਬੇਕਾਰ ਉਠਾਉਣ ਤੋਂ ਰੋਕਦਾ ਹੈ।
UX ਸਿਰਫ ਐਪ ਨਹੀਂ ਹੁੰਦੀ—ਇਹ ਇਹ ਵੀ ਹੈ ਕਿ ਡਿਵਾਈਸ ਕਿਵੇਂ ਵਰਤਦਾ ਹੈ। ਇੱਕ ਮੋਸ਼ਨ ਸੈਂਸਰ ਜੋ ਕੰਪਨ 'ਤੇ ਟ੍ਰਿਗਰ ਕਰਦਾ ਹੈ ਫੈਂਟਮ ਅਲਰਟਾਂ ਪੈਦਾ ਕਰ ਸਕਦਾ ਹੈ; ਇੱਕ ਵਾਤਾਵਰਣ ਸੈਂਸਰ ਜਿਸ ਦਾ ਜਵਾਬ ਧੀਮਾ ਹੋਵੇ ਅਸਲ ਤਬਦੀਲੀਆਂ ਨੂੰ ਮਿਸ ਕਰ ਸਕਦਾ ਹੈ; ਅਤੇ ਇੱਕ ਖਰਾਬ ਪਾਵਰ ਡਿਜ਼ਾਈਨ "ਇੱਕ-ਸਾਲ ਬੈਟਰੀ" ਵਾਅਦਾ ਤਿੰਨ ਮਹੀਨੇ 'ਚ ਖਤਮ ਹੋ ਸਕਦਾ ਹੈ।
ਸੈਂਸਰ ਅਤੇ MCU ਨੂੰ ਇਕੱਠੇ ਚੁਣਨ ਨਾਲ—ਸ਼ੋਰ, ਲੈਟੈਂਸੀ, ਅਤੇ ਘੱਟ-ਪਾਵਰ ਕਾਬਲੀਅਤ ਦੇ ਅਧਾਰ 'ਤੇ—ਤੁਹਾਨੂੰ ਇੱਕ ਐਸਾ ਉਤਪਾਦ ਪਹੁੰਚਾਉਣ ਵਿੱਚ ਮਦਦ ਮਿਲਦੀ ਹੈ ਜੋ ਜ਼ਿੰਦਾ, ਗਲਤ ਅਲਰਟਾਂ ਤੋਂ بچਦਾ ਅਤੇ ਬੈਟਰੀ ਜਿੰਦਗੀ ਦੀ ਉਮੀਦ ਨੂੰ ਪੂਰਾ ਕਰਦਾ ਹੈ ਬਿਨਾਂ ਆਕਾਰ ਜਾਂ ਲਾਗਤ ਵਧਾਏ।
ਉਦਯੋਗਿਕ ਕੰਟਰੋਲ ਫਲੈਸ਼ੀ ਫੀਚਰਾਂ ਤੋਂ ਘੱਟ, ਬਲਕਿ ਲੰਬੇ ਸਮੇਂ ਤੱਕ ਪੇਸ਼ਗੋਈਯੋਗ ਵਿਹਾਰ ਬਾਰੇ ਹੈ। ਚਾਹੇ ਤੁਸੀਂ PLC-ਸਮਕਕੀ ਮੌਡੀਊਲ, ਮੋਟਰ ਡ੍ਰਾਈਵ ਜਾਂ ਕंडीਸ਼ਨ-ਮਾਨੀਟਰੀੰਗ ਨੋਡ ਬਣਾ ਰਹੇ ਹੋ, ਪਲੇਟਫਾਰਮ ਚੋਣ ਨੂੰ ਨਿਰਧਾਰਿਤ ਟਾਈਮਿੰਗ, ਸ਼ਕਤੀਸ਼ਾਲੀ ਧੁਪ ਅਤੇ ਸਾਲਾਂ ਤੱਕ ਸਰਵਿਸेबल ਰਹਿਣਾ ਚਾਹੀਦਾ ਹੈ।
ਆਮ ਪੈਟਰਨ ਇੱਕ MCU-ਆਧਾਰਿਤ "ਸਾਇਡਕਾਰ" ਹੁੰਦਾ ਹੈ ਜੋ PLC ਨੂੰ ਵਾਧੂ I/O, ਖਾਸ ਮਾਪਕ ਜਾਂ ਕਨੈਕਟਿਵਿਟੀ ਦਿੰਦਾ ਹੈ—ਬਿਨਾਂ ਸਮੂਹ ਕੰਟਰੋਲ ਕੈਬਿਨੇਟ ਨੂੰ ਰੀਡਿਜ਼ਾਈਨ ਕੀਤੇ। ST MCUs ਮੋਟਰ ਕੰਟਰੋਲ (ਡ੍ਰਾਈਵ, ਪੰਪ, ਕੰਵੇਅਰ), ਮੈਟਰਿੰਗ, ਅਤੇ ਕੰਡੀਸ਼ਨ ਮਾਨੀਟਰੀੰਗ ਵਿੱਚ ਵੀ ਵਿਆਪਕ ਵਰਤੋਂ ਹੁੰਦੇ ਹਨ—ਅਕਸਰ ਰੀਅਲ-ਟਾਈਮ ਕੰਟਰੋਲ ਲੂਪ, ਸੈਂਸਰ ਅਕ੍ਵੀਜ਼ੀਸ਼ਨ ਅਤੇ ਲੋਕਲ ਫੈਸਲੇ ਇਕੱਠੇ ਕਰਦੇ ਹੋਏ।
ਨਿਰਧਾਰਿਤ ਕੰਟਰੋਲ ਦਾ ਮਤਲਬ ਹੈ ਕਿ ਤੁਹਾਡੀ ਸੈਂਪਲਿੰਗ, ਕੰਟਰੋਲ ਲੂਪ ਐਗਜ਼ਿਕਯੂਸ਼ਨ ਅਤੇ ਆਉਟਪੁੱਟ ਹਰ ਸਾਈਕਲ ਤੇ ਉਮੀਦ ਅਨੁਸਾਰ ਹੋਵਨ। ਪ੍ਰਯੋਗਿਕ ਸਹਾਇਤਾ:
ਡਿਜ਼ਾਈਨ ਦਾ ਲਕਸ਼ ਹੈ ਕਿ ਸਮੇਂ-ਸੰਵੇਦਨਸ਼ੀਲ ਟਾਸਕ ਕੰਮ ਕਰਨ ਜਿਵੇਂ ਕਿ ਕਮਿਊਨਿਕੇਸ਼ਨ, ਲੌਗਿੰਗ ਜਾਂ UI ਵਿਅਸਤ ਹੋਣ 'ਤੇ ਵੀ ਸਥਿਰ ਰਹਿਣ।
ਉਦਯੋਗਿਕ ਸਾਈਟਾਂ ਮਕੈਨਿਕਲ ਦਬਾਅ ਅਤੇ ਬਿਜਲੀਕ ਰੁਕਾਵਟ ਜੋ ਕਿ ਉਪਭੋਗਤਾ ਉਤਪਾਦਾਂ ਵਿੱਚ ਘੱਟ ਮਿਲਦੇ ਹਨ, ਲਾਂਦੀਆਂ ਹਨ। ਮੁੱਖ ਚਿੰਤਾਵਾਂ ਵਿੱਚ ਕੰਪਨ (ਖਾਸ ਕਰਕੇ ਮੋਟਰਾਂ ਦੇ ਨੇੜੇ), ਧੂੜ ਅਤੇ ਨਮੀ ਅਤੇ switching loads ਤੋਂ ਨਿਕਲਣ ਵਾਲੀ ਬਿਜਲੀਕ ਨੋਇਜ਼ ਸ਼ਾਮਿਲ ਹਨ। ਇੱਥੇ ਸੈਂਸਰ ਚੋਣ ਅਤੇ ਪਲੇਸਮੈਂਟ ਮਹੱਤਵਪੂਰਨ ਹਨ—ਕੰਪਨ ਮਾਨੀਟਰੀੰਗ ਲਈ ਅਕਸੇਲੀਰੋਮੀਟਰ, ਡ੍ਰਾਈਵਾਂ ਲਈ ਕਰੈਂਟ/ਵੋਲਟੇਜ ਸੈਂਸਿੰਗ, ਅਤੇ ਜਦੋਂ ਮੁਅੱਤਰ ਕੰਡੀਸ਼ਨ ਬਕਸਿਆਂ ਦੀ ਭੂਮਿਕਾ ਨਿਸ਼ਚਿਤ ਹੁੰਦੀ ਹੈ ਤਾਂ ਵਾਤਾਵਰਨਿਕ ਸੈਂਸਰ।
ਕਈ ਉਦਯੋਗਿਕ ਸਿਗਨਲ ਸਿੱਧਾ MCU ਵਿੱਚ ਤਾਰ ਨਹੀਂ ਕੀਤੇ ਜਾ ਸਕਦੇ।
ਉਦਯੋਗਿਕ ਡਿਪਲੌਇਮੈਂਟ ਲਈ ਲੰਬੇ ਸਮੇਂ ਦੀ ਯੋਜਨਾ ਬਣਾਓ: ਸਪੇਅਰ ਯੂਨਿਟ, ਕੰਪੋਨੈਂਟ ਉਪਲਬਧਤਾ, ਅਤੇ ਫਰਮਵੇਅਰ ਅਪਡੇਟ ਜੋ ਆਪਰੇਸ਼ਨ ਨੂੰ ਰੁਕਾਵਟ ਨਾ ਪਹੁੰਚਾਉਂਦੇ। ਇੱਕ ਪ੍ਰਯੋਗਿਕ ਲਾਈਫਸਾਇਕਲ ਅਭਿਗਮ ਵਿੱਚ ਵਰਸੀਡ ਫਰਮਵੇਅਰ, ਸੁਰੱਖਿਅਤ ਅਪਡੇਟ ਮੈਕੈਨਿਜ਼ਮ, ਅਤੇ ਸਪਸ਼ਟ ਡਾਇਗਨੋਸਟਿਕ ਸ਼ਾਮਿਲ ਹਨ ਤਾਂ ਜੋ ਰੱਖ-ਰਖਾਅ ਟੀਮ ਤੇਜ਼ੀ ਨਾਲ ਸਮੱਸਿਆ ਠੀਕ ਕਰ ਸਕਣ ਅਤੇ ਉਪਕਰਣ ਚਲਦਾ ਰਹੇ।
ਕਨੈਕਟਿਵਿਟੀ ਉਸ ਸਥਿਤੀ ਨੂੰ ਬਣਾਉਂਦੀ ਹੈ ਜਦੋ ਇੱਕ ਐਂਬੈੱਡਡ ਪਲੇਟਫਾਰਮ "ਸਿਰਫ਼ ਬੋਰਡ ਅਤੇ ਸੈਂਸਰ" ਨਾ ਰਹਿ ਕੇ ਸਿਸਟਮ ਦਾ ਹਿੱਸਾ ਬਣ ਜਾਂਦਾ ਹੈ: ਇੱਕ ਵਾਹਨ ਨੈਟਵਰਕ, ਇਮਾਰਤ ਭਰ ਦਾ ਡਿਵਾਈਸ, ਜਾਂ ਉਤਪਾਦਨ ਲਾਈਨ। ST-ਅਧਾਰਿਤ ਡਿਜ਼ਾਈਨ ਆਮ ਤੌਰ 'ਤੇ MCU/MPU ਨੂੰ ਇੱਕ ਜਾਂ ਇੱਕ ਤੋਂ ਵੱਧ ਰੇਡੀਓ ਜਾਂ ਤਾਰਵਾਰ ਇੰਟਰਫੇਸ ਨਾਲ ਜੋੜਦੇ ਹਨ, ਜੋ ਕੰਮ ਮੁਤਾਬਕ ਹੋਂਦੀਆਂ ਹਨ।
BLE ਛੋਟੇ-ਦੂਰੀ ਲਿੰਕਾਂ ਲਈ ਵਧੀਆ ਹੈ—ਫੋਨਾਂ, ਕਮਿਸ਼ਨਿੰਗ ਟੂਲਜ਼ ਜਾਂ ਨੇੜੇ ਹੱਬ ਲਈ। ਇਹ ਆਮ ਤੌਰ 'ਤੇ ਘੱਟ-ਪਾਵਰ ਲਈ ਸਹੀ ਰਾਹ ਹੈ, ਪਰ ਲੰਬੀ ਦੂਰੀ 'ਤੇ ਉੱਚ ਡੇਟਾ ਦਰ ਲਈ ਬਣਾਇਆ ਨਹੀਂ ਗਿਆ।
Wi‑Fi ਸਿੱਧੇ-ਰਾਊਟਰ ਡਿਵਾਈਸਾਂ ਲਈ ਵੱਧ ਥਰੂਪੁੱਟ ਦਿੰਦਾ (ਕੈਮਰੇ, ਐਪਲਾਇੰਸ, ਗੇਟਵੇ)। ਵਪਾਰਿਕਤਾ: ਪਾਵਰ ਖਪਤ ਅਤੇ ਐਂਟੀਨਾ/ਐਨਕਲੋਜ਼ਰ ਕੰਮ ਵਧੇਰੇ ਮੰਗੇ।
Ethernet ਫੈਕਟਰੀ ਲਈ ਭਰੋਸੇਯੋਗ ਵਾਇਰਡ ਥਰੂਪੁੱਟ ਅਤੇ ਪੇਸ਼ਗੋਈਯੋਗ ਵਿਹਾਰ ਦਿੰਦਾ। ਜਿਵੇਂ ਜਦੋਂ ਵਾਹਨਾਂ ਵਿੱਚ ਬੈਂਡਵਿਡਥ ਵੱਧਦੀ ਜਾ ਰਹੀ ਹੈ, ਤਾਂ Automotive Ethernet ਵੀ ਆਮ ਹੋ ਰਿਹਾ ਹੈ।
Cellular (LTE-M/NB-IoT/4G/5G) ਵੱਡੇ ਖੇਤਰ ਕਵਰੇਜ ਲਈ ਹੈ ਜਦੋਂ ਸਥਾਨਕ ਢਾਂਚਾ ਨਹੀਂ ਹੁੰਦਾ। ਇਹ ਲਾਗਤ, ਸਰਟੀਫਿਕੇਸ਼ਨ ਕੋਸ਼ਿਸ਼, ਅਤੇ ਪਾਵਰ ਆਚਰਣ ਜ਼ਿਆਦਾ ਲਿਆਉਂਦਾ—ਖਾਸਕਰ ਕਿ ਜੇ ਸਦੀਵ-ਚਾਲੂ ਵਰਤੋਂ ਹੋਵੇ।
Sub‑GHz (ਜਿਵੇਂ 868/915 MHz) ਲੰਬੀ ਦੂਰੀ ਤੇ ਘੱਟ ਡੇਟਾ ਦਰ ਲਈ ਹੋਦਾ ਹੈ, ਆਮ ਤੌਰ 'ਤੇ ਉਨ੍ਹਾਂ ਸੈਂਸਰਾਂ ਲਈ ਜੋ ਕਦੇ-ਕਦੇ ਛੋਟੇ ਪੈਕੇਟ ਭੇਜਦੇ ਹਨ।
ਸ਼ੁਰੂ ਕਰੋ ਰੇਂਜ ਅਤੇ ਸੁਨੇਹੇ ਦੇ ਆਕਾਰ ਨਾਲ (ਤਾਪਮਾਨ ਪੜਤਾਲ vs ਆਡੀਓ ਸਟਰੀਮਿੰਗ), ਫਿਰ ਬੈਟਰੀ ਜ਼ਿੰਦਗੀ ਅਤੇ ਪੀਕ ਕਰੰਟ ਲੋੜਾਂ ਦੀ ਪੁਸ਼ਟੀ ਕਰੋ। ਆਖ਼ਿਰ ਵਿੱਚ ਖੇਤਰੀ ਨਿਯਮਾਂ (ਲਾਇਸੰਸ ਵਾਲੇ ਸੈੱਲੁਲਰ vs ਅਨਲਾਇਸੈਂਸ sub‑GHz ਸੀਮਾਵਾਂ, ਚੈਨਲ ਪਲੈਨ, ਟ੍ਰਾਂਸਮਿਟ ਪਾਵਰ) ਨੂੰ ਧਿਆਨ ਵਿੱਚ ਰੱਖੋ।
ਲੋਕਲ ਗੇਟਵੇਅ ਤਿਆਰ ਕਰੋ ਜਦੋਂ ਤੁਸੀਂ ਬਹੁਤ-ਘੱਟ-ਪਾਵਰ ਐਂਡਪੋਇੰਟ ਚਾਹੁੰਦੇ ਹੋ, ਪ੍ਰੋਟੋਕੋਲ ਬ੍ਰਿਜ ਕਰਨਾ ਹੋਵੇ (BLE/sub‑GHz to Ethernet), ਜਾਂ ਜਦੋਂ ਇੰਟਰਨੈੱਟ ਡ੍ਰੌਪ ਹੋਣ 'ਤੇ ਬਫਰਿੰਗ ਚਾਹੀਦੀ ਹੋਵੇ।
ਸਿੱਧਾ-ਟੂ-ਕਲਾਉਡ ਇੱਕਲ-ਡਿਵਾਈਸਾਂ ਲਈ ਆਰਕੀਟੈਕਚਰ ਨੂੰ ਸਧਾਰਤ ਕਰਦਾ ਹੈ (Wi‑Fi/ਸੈੱਲੁਲਰ), ਪਰ ਇਹ ਪਾਵਰ ਡਿਜ਼ਾਈਨ, ਪ੍ਰੋਵੀਜ਼ਨਿੰਗ ਅਤੇ ਲਗਾਤਾਰ ਕਨੈਕਟਿਵਿਟੀ ਲਾਗਤ ਨੂੰ ਜ਼ਿੰਮੇਵਾਰ ਬਣਾਉਂਦਾ ਹੈ।
ਐਂਟੀਨਾ ਦੀ ਕਾਰਗੁਜ਼ਾਰੀ ਧਾਤੂ ਹਾਊਜ਼ਿੰਗ, ਬੈਟਰੀ, ਕੇਬਲ ਬੰਡਲ ਜਾਂ ਹਾਥ ਦੇ ਰੁੱਖੇ ਨਾਲ ਖਰਾਬ ਹੋ ਸਕਦੀ ਹੈ। ਸਪੇਸ ਦੇ ਲਈ ਯੋਜਨਾ ਬਣਾਓ, ਮੈਟੇਰੀਅਲ ਨੂੰ ਧਿਆਨ ਨਾਲ ਚੁਣੋ, ਅਤੇ ਆਖ਼ਰੀ ਐਨਕਲੋਜ਼ਰ ਨਾਲ ਜਲਦੀ ਟੈਸਟ ਕਰੋ—ਕਈ ਵਾਰੀ ਕਨੈਕਟਿਵਿਟੀ ਸਮੱਸਿਆਵਾਂ ਫਰਮਵੇਅਰ ਨਾਲ ਨਹੀਂ, ਮਕੈਨਿਕਲ ਕਾਰਨਾਂ ਨਾਲ ਹੁੰਦੀਆਂ ਹਨ।
ਸੁਰੱਖਿਆ ਕੋਈ ਇਕ ਫੀਚਰ ਨਹੀਂ ਜੋ ਤੁਸੀਂ "ਬਾਅਦ ਵਿੱਚ ਜੋੜ ਦਿੰਦੇ" ਹੋ। ਐਂਬੈੱਡਡ ਪਲੇਟਫਾਰਮ ਅਤੇ ਸੈਂਸਰਾਂ ਨਾਲ ਇਹ ਇੱਕ ਫੈਸਲੇ ਦੀ ਲੜੀ ਹੁੰਦੀ ਹੈ ਜੋ ਡਿਵਾਈਸ ਦੇ ਪਾਵਰ-ਆਨ ਹੋਣ ਤੋਂ ਸ਼ੁਰੂ ਹੁੰਦੀ ਹੈ ਅਤੇ ਹਰ ਫਰਮਵੇਅਰ ਅਪਡੇਟ ਤੱਕ ਜਾਰੀ ਰਹਿੰਦੀ ਹੈ।
ਆਮ ਨਿਰਪਾਠੀ ਦੇ ਤੌਰ 'ਤੇ secure boot ਹੁੰਦੀ ਹੈ: ਡਿਵਾਈਸ ਇਹ ਯਕੀਨੀ ਬਣਾਉਂਦਾ ਹੈ ਕਿ ਫਰਮਵੇਅਰ ਚੱਲਣ ਤੋਂ ਪਹਿਲਾਂ ਪ੍ਰਮਾਣਿਕ ਹੈ। ST ਪਲੇਟਫਾਰਮਾਂ 'ਤੇ ਇਹ ਅਕਸਰ ਇੱਕ ਹਾਰਡਵੇਅਰ ਰੂਟ ਆਫ਼ ਟਰਸਟ (MCU ਸੁਰੱਖਿਆ ਫੀਚਰ ਜਾਂ ਸੁਰੱਖਿਅਤ ਐਲਿਮੈਂਟ) ਅਤੇ ਸਾਈਨ ਕੀਤੇ ਇਮੇਜ਼ ਨਾਲ ਲਾਗੂ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
ਅਗਲਾ ਕਦਮ ਕੀ ਸਟੋਰੇਜ ਹੈ। ਕੁੰਜੀਆਂ ਐਸੀ ਥਾਵਾਂ 'ਤੇ ਰੱਖੀਆਂ ਜਾਣੀਆਂ ਚਾਹੀਦੀਆਂ ਹਨ ਜੋ ਕਢਣ ਤੋਂ ਰੋਕਣ ਵਾਲੀਆਂ ਹੁੰਦੀਆਂ ਹਨ—ਜਾਂ ਤਾ MCU ਦੇ ਸੁਰੱਖਿਅਤ ਖੇਤਰ ਜਾਂ ਇਕ ਸੁਰੱਖਿਅਤ ਐਲਿਮੈਂਟ—ਤਾਂ ਜੋ ਐਨਕ੍ਰਿਪਟਡ ਫਰਮਵੇਅਰ ਅਪਡੇਟ ਸੰਭਵ ਹੋ ਸਕਣ, ਜਿੱਥੇ ਡਿਵਾਈਸ ਇਮੇਜ ਦੀ ਸਿਗਨੇਚਰ ਦੀ ਜਾਂਚ (ਇਨਟੀਗ੍ਰਿਟੀ/ਪ੍ਰਮਾਣਿਕਤਾ) ਅਤੇ ਲੋੜ ਹੋਣ 'ਤੇ ਪੇਲੋਡ ਨੂੰ ਡੀਕ੍ਰਿਪਟ (ਗੁਪਤਤਾ) ਕਰਦਾਂ ਹੈ।
ਖਪਤਕਾਰ IoT ਡਿਵਾਈਸਾਂ ਨੂੰ ਅਕਸਰ ਵੱਧ-ਪੈਮਾਨੇ 'ਤੇ ਦੂਰ-ਦੂਰ हमला (ਬੋਟਨੇਟ, ਯੂਜ਼ਰ-ਕ੍ਰੈਡੈਂਸ਼ੀਅਲ ਅਟੈਕ, ਸਸਤੇ ਫਿਜ਼ੀਕਲ ਪਹੁੰਚ) ਨਾਲ ਸਾਮ੍ਹਣਾ ਕਰਨਾ ਪੈਂਦਾ ਹੈ। ਉਦਯੋਗਿਕ ਸਿਸਟਮ ਇੱਕ ਲਕੜੀਦਾਰ ਹਮਲੇ, ਨੁਕਸਾਨ ਅਤੇ ਲੰਬੇ ਸੇਵਾ ਜੀਵਨ ਨਾਲ ਜੁੜੇ ਖਤਰੇ ਬਾਰੇ ਵੱਧ ਚਿੰਤਤ ਹੁੰਦੇ ਹਨ ਜਿੱਥੇ ਪੈਚ ਕਰਨ ਦੀ ਜਗ੍ਹਾ ਘੱਟ ਹੁੰਦੀ ਹੈ। ਆਟੋਮੋਟਿਵ ਇਲੈਕਟ੍ਰਾਨਿਕਸ ਨੂੰ ਸੁਰੱਖਿਆ-ਸਬੰਧੀ ਖਤਰਿਆਂ ਨਾਲ ਨਜਿੱਠਣਾ ਪੈਂਦਾ ਹੈ, ਮੁਤਲਕ ਸਪਲਾਈ ਚੇਨ ਅਤੇ ਕੌਣ ਅਪਡੇਟ ਕਰ ਸਕਦਾ ਹੈ—ਖਾਸ ਕਰਕੇ ਜਦੋਂ ਕਈ ECUs ਵਾਹਨ ਨੈਟਵਰਕ ਸਾਂਝਾ ਕਰ ਰਹੇ ਹੋਣ।
Provisioning (ਮੈਨੂਫੈਕਚਰਿੰਗ ਦੌਰਾਨ ਕੁੰਜੀਆਂ/ਅਸਨੈਟੀਆਂ ਇੰਜੈਕਟ ਕਰਨਾ), ਅਪਡੇਟਸ (A/B swap ਜਾਂ rollback ਸੁਰੱਖਿਆ) ਅਤੇ decommissioning (ਕ੍ਰੈਡੈਂਸ਼ੀਅਲ ਰਿਵੋਕੇਸ਼ਨ, ਸੰਵੇਦਨਸ਼ੀਲ ਡੈਟਾ ਵਾਈਪ ਅਤੇ end-of-support ਵਰਤੀ ਜਾਣ ਦੀ ਦਸਤਾਵੇਜ਼ੀ) ਲਈ ਯੋਜਨਾ ਬਣਾਓ।
ਸਪਸ਼ਟ ਰਿਕਾਰਡ ਰੱਖੋ: ਤੁਹਾਡਾ threat model, secure boot/update ਫਲੋ, key management ਅਤੇ rotation ਦੀ ਰਣਨੀਤੀ, vulnerability intake ਅਤੇ patch policy, SBOM, ਅਤੇ ਟੈਸਟ ਸਬੂਤ (ਪੈਨਟਰੇਸ਼ਨ ਰਿਪੋਰਟ, ਫੱਜ਼ਿੰਗ ਨੋਟਸ, ਸੁਰੱਖਿਅਤ ਕੋਡਿੰਗ ਅਭਿਆਸ)। ਜੋ ਤੁਸੀਂ ਕਰਦੇ ਹੋ ਉਦੋਂ ਦੀ ਵਿਆਖਿਆ ਕਰੋ—ਸਰਟੀਫਿਕੇਸ਼ਨ ਦਾ ਦਾਅਵਾ ਨਾ ਕਰੋ ਜੇਕਰ ਉਹ ਅਧਿਕਾਰਿਤ ਤੌਰ 'ਤੇ ਪੂਰਾ ਨਹੀਂ ਹੋਇਆ।
ਪਾਵਰ ਅਤੇ ਗਰਮੀ ਐਂਬੈੱਡਡ ਉਤਪਾਦਾਂ ਵਿੱਚ ਘੰਢੇ ਹਨ: ਹਰ ਖਰਚ ਕੀਤਾ ਮਿਲੀਵਾਟ ਤਾਪਮਾਨ ਵਾਧਾ ਬਣ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਤਾਪਮਾਨ ਸਿੱਧਾ ਸੈਂਸਰ ਸਹੀਤਾ, ਬੈਟਰੀ ਕਾਰਗੁਜ਼ਾਰੀ ਅਤੇ ਲੰਬੇ ਸਮੇਂ ਦੀ ਭਰੋਸੇਯੋਗਤਾ ਨੂੰ ਪ੍ਰਭਾਵਿਤ ਕਰਦਾ ਹੈ। ਪਹਿਲਾਂ ਇਹ ਸਹੀ ਕਰਨਾ ਬਾਅਦ ਵਿੱਚ ਬਹੁਤ ਬਚਤ ਕਰਦਾ ਹੈ।
ਜ਼ਿਆਦातर ਡਿਜ਼ਾਈਨ ਇੱਕ ਛੋਟਾ ਸੈੱਟ ਰੇਲਾਂ ਨਾਲ ਖਤਮ ਹੁੰਦੇ ਹਨ: ਬੈਟਰੀ/ਇਨਪੁੱਟ ਰੇਲ, ਇਕ ਜਾਂ ਜ਼ਿਆਦਾ ਰੈਗੂਲੈਟਿਡ ਲੌਜਿਕ ਰੇਲ (ਅਕਸਰ 3.3 V ਅਤੇ/ਜਾਂ 1.8 V), ਅਤੇ ਕਈ ਵਾਰੀ ਐਕਚੁਏਟਰ ਜਾਂ ਡਿਸਪਲੇਅ ਲਈ ਇਕ ਉੱਚ ਰੇਲ।
ਕੁਝ ਪ੍ਰਯੋਗਿਕ ਨਿਯਮ:
ਬੈਟਰੀ ਮੈਨੇਜਮੈਂਟ ਮੂਲ-ਨਿਯਮ: chemistry ਨਾਲ ਮੇਲ ਖਾਂਦੀਆਂ ਸੁਰੱਖਿਆ/ਚਾਰਜਿੰਗ ਚੋਣੋ, ਅਤੇ brownout ਵਿਹਾਰ (ਬੈਟਰੀ ਘਟਦੇ ਸਮੇਂ MCU, ਸੈਂਸਰ, ਅਤੇ ਮੈਮੋਰੀ 'ਤੇ ਕੀ ਹੁੰਦਾ ਹੈ) ਲਈ ਬਜਟ ਬਣਾਓ।
ਅਨੇਕ ਉਤਪਾਦ ਆਪਣੀ ਬੈਟਰੀ-ਲਾਈਫ ਟਾਰਗੇਟ ਨੂੰ ਇਸ ਲਈ ਮਿਲਦੇ ਕਿਉਂਕਿ ਉਹ ਔਸਤ ਕਰੰਟ ਲਈ ਡਿਜ਼ਾਈਨ ਕਰਦੇ ਹਨ ਪਰ ਪੀਕਸ ਨੂੰ ਭੁੱਲ ਜਾਂਦੇ ਹਨ:
ਤੁਹਾਡੇ ਰੈਗੂਲੇਟਰ ਅਤੇ ਡੀਕਪਲਿੰਗ ਨੂੰ ਡਰੌਪ ਬਿਨਾਂ ਪੀਕਸ ਸੰਭਾਲਣੇ ਚਾਹੀਦੇ ਹਨ, ਜਦਕਿ ਫਰਮਵੇਅਰ ਨੂੰ ਸਲੀਪ ਮੋਡ ਅਤੇ ਡਿਊਟੀ ਸਾਈਕਲ ਰਾਹੀਂ ਔਸਤ ਨੂੰ ਨੀਵਾਂ ਰੱਖਣਾ ਚਾਹੀਦਾ ਹੈ।
ਗਰਮੀ ਸਿਰਫ ਚਿਪ ਬਾਰੇ ਨਹੀਂ ਹੁੰਦੀ। ਐਨਕਲੋਜ਼ਰ ਮੈਟੇਰੀਅਲ, ਹਵਾਘਟ ਅਤੇ ਮਾਊਂਟਿੰਗ ਸਤਹ ਅਕਸਰ ਮੁੱਖ ਭੂਮਿਕਾ ਨਿਭਾਉਂਦੇ ਹਨ। ਹਮੇਸ਼ਾ ਯਕੀਨੀ ਕਰੋ:
ਇੱਕ ਪ੍ਰੋਟੋਟਾਈਪ ਕੰਮ ਕਰਾਉਣਾ ਸਿਰਫ ਸ਼ੁਰੂਆਤ ਹੈ। ਅਸਲ ਸਮਾਂ ਬਚਤ ST ਪਲੇਟਫਾਰਮਾਂ ਦੇ ਆਸ-ਪਾਸ ਦੇ ਇਕੋਸਿਸਟਮ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਹੁੰਦੀ ਹੈ ਤਾਂ ਜੋ ਤੁਸੀਂ ਪੀਸੀਬੀ ਸਪਿੰਨ, ਸਰਟੀਫਿਕੇਸ਼ਨ, ਜਾਂ ਮੈਨੂਫੈਕਚਰਿੰਗ ਰਨ 'ਤੇ ਫ਼ੈਸਲਾ ਕਰਨ ਤੋਂ ਪਹਿਲਾਂ ਮੁੜ-ਕੰਮ ਘਟਾ ਸਕੋ।
ST ਦੇ ਇਵੈਲਿਊਏਸ਼ਨ ਬੋਰਡ ਅਤੇ ਉਦਾਹਰਣ ਪ੍ਰੋਜੈਕਟ ਤੁਹਾਨੂੰ ਤੇਜ਼ੀ ਨਾਲ ਰੁਪ-ਰੈਣੂ ਕਰਨ ਦਿੰਦੇ ਹਨ ਜਦੋਂ ਕਿ ਉਤਪਾਦਨ ਦੀ ਰਾਹ ਵੀ ਬਚਾਈ ਜਾ ਸਕਦੀ ਹੈ:
ਇਨ੍ਹਾਂ ਨੂੰ "ਲਰਨਿੰਗ ਹਾਰਡਵੇਅਰ" ਵਾਂਗ ਵਰਤੋਂ: ਜੋ ਤਬਦੀਲੀਆਂ ਤੁਸੀਂ ਕਰਦੇ ਹੋ ਉਹ ਦਸਤਾਵੇਜ਼ ਕਰੋ, ਅਤੇ ਉਹ assumptions ਦੀ ਸੂਚੀ ਬਣਾਈ ਰੱਖੋ ਜੋ ਤੁਹਾਨੂੰ ਆਪਣੇ ਖੁਦ ਦੇ ਬੋਰਡ 'ਤੇ ਜਾਂਚਣੀ ਹੈ।
ਭਾਵੇਂ ਐਂਬੈੱਡਡ ਪਾਸ "ਮੁਕੰਮਲ" ਹੋ, ਜ਼ਿਆਦਾਤਰ ਉਤਪਾਦਾਂ ਨੂੰ ਇਸਤੋਂ ਬਾਅਦ ਵੀ ਸਾਥੀ ਤਹਤ: ਪ੍ਰੋਵੀਜ਼ਨਿੰਗ ਸਕ੍ਰੀਨ, ਡੈਸ਼ਬੋਰਡ, ਲੌਗ, ਅਲਰਟ ਅਤੇ ਮੈਨੂਫੈਕਚਰਿੰਗ/ਫੀਲਡ ਸਹਾਇਤਾ ਲਈ ਸਧਾਰਨ APIs ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ। ਟੀਮਾਂ ਅਕਸਰ ਇਸ ਕੰਮ ਨੂੰ ਘੱਟ ਅੰਕ ਲਈ ਅੰਦਾਜ਼ਾ ਲਗਾਉਂਦੀਆਂ ਹਨ।
ਇੱਥੇ ਇੱਕ vibe-coding ਵਰਕਫਲੋ ਵਰਗਾ Koder.ai ਵਰਤਣਾ ਵਧੀਆ ਹੈ: ਤੁਸੀਂ ਇੱਕ ਹਲਕਾ-ਫੁਲਕਾ ਵੈਬ ਡੈਸ਼ਬੋਰਡ, ਛੋਟਾ Go + PostgreSQL ਬੈਕਐਂਡ, ਜਾਂ ਇੱਕ Flutter ਮੋਬਾਈਲ ਕਮਪੈਨਿਅਨ ਐਪ ਚੈਟ-ਅਧਾਰਤ ਨਿਰਦੇਸ਼ ਤੋਂ ਸੱਜਾ ਸਕਦੇ ਹੋ, ਫਿਰ ਜਦੋਂ ਤਕ ਡਿਵਾਈਸ ਟੈਲੀਮੇਟਰੀ ਅਤੇ ਲੋੜਾਂ ਬਦਲਦੀਆਂ ਹਨ ਤੇਜ਼ੀ ਨਾਲ ਇਤਰੈਟ ਕਰੋ। ਇਹ ਖਾਸ ਕਰਕੇ ਪਾਇਲਟ ਦੌਰਾਨ ਮੁਫ਼ੀਦ ਹੈ ਜਦੋਂ ਤੁਸੀਂ ਲਗਾਤਾਰ ਲਾਗਿੰਗ ਅਤੇ ਵਿਜ਼ੂਲਾਈਜੇਸ਼ਨ ਬਾਰੇ ਫੈਸਲੇ ਬਦਲ ਰਹੇ ਹੋ।
ਕੁਝ ਫੇਲ ਸਿਰਫ ਤਦਹੀ ਨਿਕਲ ਕੇ ਆਉਂਦੀਆਂ ਹਨ ਜਦੋਂ ਡਿਵਾਈਸ ਅਸਲ ਵਿੱਚ ਤਿਆਰ ਹੁੰਦਾ ਹੈ:
ਆਮ ਜਹਿਰ: ਕੰਪੋਨੈਂਟ ਉਪਲਬਧਤਾ, ਕਮੀ ਟੈਸਟ ਪੁਆਇੰਟਸ (SWD, ਪਾਵਰ ਰੇਲ, ਸੈਂਸਰ ਇੰਟਰਪਟ), ਅਤੇ ਕੋਈ ਯੋਜਨਾ ਨਹੀਂ ਮੈਨੂਫੈਕਚਰਿੰਗ ਟੈਸਟ (ਪ੍ਰੋਗਰਾਮਿੰਗ, ਕੈਲੀਬ੍ਰੇਸ਼ਨ, ਮੂਢਾ RF/ਸੈਂਸਰ ਚੈਕ)। ਟੈਸਟ ਅਤੇ ਕੈਲੀਬ੍ਰੇਸ਼ਨ ਦੇ ਲਈ ਡਿਜ਼ਾਈਨ ਕਰਨ ਨਾਲ ਪ੍ਰਤੀ ਬੈਚ ਦਿਨਾਂ ਬੱਚ ਸਕਦੇ ਹਨ।
ਪਾਇਲਟ ਦੌਰਾਨ ਪਾਸ/ਫੇਲ ਮਾਪਦੰਡ ਪਹਿਲਾਂ ਹੀ ਨਿਰਧਾਰਤ ਕਰੋ: KPIs (ਬੈਟਰੀ ਲਾਈਫ, reconnect ਸਮਾਂ, ਸੈਂਸਰ ਡ੍ਰਿਫਟ, ਫਾਲਸ ਅਲਾਰਮ), ਅਤੇ ਇੱਕ ਸਧਾਰਨ ਫੀਲਡ ਡੇਟਾ ਯੋਜਨਾ (ਤੁਸੀਂ ਕੀ ਲਾਗ ਕਰੋਗੇ, ਕਿੰਨੀ ਵਾਰੀ, ਅਤੇ ਕਿਵੇਂ ਪ੍ਰਾਪਤ ਕਰੋਗੇ)। ਇਹ ਪਾਇਲਟ ਫੀਡਬੈਕ ਨੂੰ ਵੀਚਾਰਾਂ ਵਜੋਂ ਨਹੀਂ, ਨਿਰਣਿਆਂ ਵਜੋਂ ਬਦਲ ਦਿੰਦਾ ਹੈ।
MCU/MPU ਪਲੇਟਫਾਰਮ ਅਤੇ ਸੈਂਸਰ ਸੈੱਟ ਚੁਣਨਾ ਆਸਾਨ ਹੁੰਦਾ ਹੈ ਜਦੋਂ ਤੁਸੀਂ ਇਸਨੂੰ ਇੱਕ ਫਨਲ ਵਾਂਗ ਲੈਂਦੇ ਹੋ: ਲੋੜਾਂ ਨਾਲ ਚੌੜਾ ਸ਼ੁਰੂ ਕਰੋ, ਫਿਰ ਸੀਮਾਵਾਂ ਨਾਲ ਸੰਕੋਚ ਕਰੋ, ਅਤੇ ਅਸਲੀ ਟੈਸਟਾਂ ਨਾਲ ਸਬੂਤ ਕਰੋ।
| Criterion | Option A | Option B | Notes |
|---|---|---|---|
| Cost (BOM + manufacturing) | Include test time and connectors | ||
| Power (active + sleep) | Use your real duty cycle | ||
| Accuracy & drift | Consider calibration effort | ||
| Compute headroom | Fusion, filtering, ML, safety margin | ||
| Connectivity fit | Bandwidth, latency, coexistence | ||
| Security & lifecycle | Secure boot, keys, updates |
ਇੱਕ ਐਂਬੈੱਡਡ ਪਲੇਟਫਾਰਮ ਇੱਕ ਉਤਪਾਦ ਲਈ ਦੁਹਰਾਏ ਜਾ ਸਕਣ ਵਾਲੀ ਬੁਨਿਆਦ ਹੁੰਦੀ ਹੈ: ਇਹ ਇੱਕ ਮੁੱਖ ਕੰਪਿਊਟ ਡਿਵਾਈਸ (MCU/MPU), ਸਹਾਇਕ ਹਿੱਸੇ (ਪਾਵਰ, ਕਲਾਕ, ਕਨੈਕਟਿਵਿਟੀ), ਨਾਲ ਹੀ ਡੇਵਲਪਮੈਂਟ ਟੂਲ, ਰੈਫਰੈਂਸ ਡਿਜ਼ਾਈਨ ਅਤੇ ਫਰਮਵੇਅਰ ਲਾਇਬ੍ਰੇਰੀਆਂ ਸ਼ਾਮਿਲ ਕਰਦਾ ਹੈ।
ਇੱਕ ਇੱਕੋਸਿਸਟਮ ਫੈਮਿਲੀ ਦੇ ਅੰਦਰ ਰਹਿਣ ਨਾਲ ਆਮ ਤੌਰ 'ਤੇ ਰੀਡਜ਼ਾਈਨ ਰਿਸਕ ਘਟ ਜਾਂਦਾ ਹੈ ਅਤੇ ਪ੍ਰੋਟੋਟਾਈਪ ਤੋਂ ਉਤਪਾਦ ਵਿੱਚ ਲਿਜਾਣ ਦੀ ਗਤੀ ਤੇਜ਼ ਹੁੰਦੀ ਹੈ।
ਇੱਕ ਸੈਂਸਰ ਇੱਕੋਸਿਸਟਮ ਸਿਰਫ਼ ਸੈਂਸਰ ਪਾਰਟ ਨੰਬਰ ਨਹੀਂ ਹੁੰਦਾ। ਇਹ ਡਰਾਈਵਰ, ਉਦਾਹਰਣ ਕੋਡ, ਕੈਲੀਬ੍ਰੇਸ਼ਨ ਨਿਰਦੇਸ਼ ਅਤੇ ਕਈ ਵਾਰ ਤਿਆਰ ਕੀਤੇ ਗਏ ਅਲਗੋਰਿਦਮ ਵੀ ਸ਼ਾਮਿਲ ਕਰਦਾ ਹੈ ਜੋ ਕੱਚੇ ਡੇਟਾ ਨੂੰ ਵਰਤਣਯੋਗ ਨਤੀਜਿਆਂ (ਘਟਨਾਵਾਂ, ਦਿਸ਼ਾ, ਮੈਟਰਿਕਸ) ਵਿੱਚ ਬਦਲਦੇ ਹਨ।
ਫਾਇਦਾ: ਏਕੀਕਰਣ ਤੇਜ਼ ਹੁੰਦਾ ਹੈ ਅਤੇ ਪ੍ਰੋਟੋਟਾਈਪ ਤੋਂ ਵੋਲਿਊਮ ਤੱਕ ਸਕੇਲ ਕਰਨ ਸਮੇਂ ਘੱਟ ਅਚਾਨਕੇ ਹੁੰਦੇ ਹਨ।
ਜਦੋਂ ਤੁਹਾਨੂੰ ਲੋੜ ਹੈ:
ਤਦ MCU ਚੁਣੋ।
MPU ਚੁਣੋ ਜਦੋਂ:
ਅਕਸਰ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਤੌਰ 'ਤੇ MCU/MPU ਚੋਣ ਨੂੰ CPU ਸਪੀਡ ਨਾਲੋਂ ਜ਼ਿਆਦਾ ਪਰਿਫੇਰਲ ਸੈੱਟ ਤੈਅ ਕਰਦਾ ਹੈ। ਆਮ “ਫੈਸਲਾ ਕਰਨ ਵਾਲੇ” ਪੈਰਾਮੀਟਰ:
ਰੀਅਲ-ਟਾਈਮ ਦਾ ਮਤਲਬ "ਸਿਰਫ ਤੇਜ਼" ਨਹੀਂ, ਬਲਕਿ ਮੁਕੱਮਲ ਗੱਲ ਲਈ ਸਭ ਤੋਂ ਵੱਧ-ਕੇਸ ਮਿਆਦ ਦੀ ਪੇਸ਼ਗੋਈਯੋਗਤਾ ਹੈ। ਪ੍ਰਯੋਗਿਕ ਕਦਮ:
MCU ਆਮ ਤੌਰ 'ਤੇ ਨਿਰਧਾਰਿਤਤਾ ਲਈ ਸਧਾਰਣ ਰਸਤਾ ਹੁੰਦਾ ਹੈ; MPUs ਨਾਲ ਇਹ ਸੰਭਵ ਹੈ ਪਰ OS/ਡਰਾਇਵਰ ਟਿਊਨਿੰਗ ਦੀ ਲੋੜ ਪੈਂਦੀ ਹੈ।
MEMS (micro-electro-mechanical systems) ਸੋਚੋ: ਛੋਟੇ ਮਿਕੈਨਿਕਲ ਸਿਰਜਣਾਤਮਕ ਢਾਂਚੇ ਜੋ ਸਿਲਿਕਾਨ 'ਤੇ ਬਣਾਏ ਜਾਂਦੇ ਹਨ ਅਤੇ IC ਵਾਂਗ ਪੈਕੇਜ ਕੀਤਾ ਜਾਂਦੇ ਹਨ।
ਇਹ ਪਸੰਦੀਦਾ ਹਨ ਕਿਉਂਕਿ ਇਹਨਾਂ ਦਾ ਆਕਾਰ ਛੋਟਾ, ਖਪਤ ਘੱਟ ਅਤੇ ਲਾਗਤ ਮੁਕਾਬਲਤਾਕਾਰ ਹੈ—ਇਹ ਵੇਅਰਏਬਲ, ਫੋਨ, ਅਤੇ ਕੰਪੈਕਟ ਉਦਯੋਗਿਕ ਨੋਡ ਲਈ ਉਪਯੋਗ ਹਨ।
ਉਹ ਪਰਾਮੀਟਰ ਜਿਨ੍ਹਾਂ ਨਾਲ ਅਮਲ ਤੇ ਅਸਰ ਪੈਂਦਾ ਹੈ:
ਫਿਰ ਆਪਣੇ ਮੈਕੈਨਿਕਲ ਮਾਊਂਟਿੰਗ ਅਤੇ ਬਾਕਸਿੰਗ ਨਾਲ ਅਸਲੀ ਦੁਨੀਆ ਵਿੱਚ ਜਾਂਚ ਕਰੋ—ਪਲੇਸਮੈਂਟ ਅਕਸਰ ਡੇਟਾਸੀਟ ਅੰਤਰਾਂ ਨੂੰ ਬੇਅਸਰ ਕਰ ਦੇਂਦਾ ਹੈ।
ਫਿਊਜ਼ਨ ਵੱਖ-ਵੱਖ ਸੈਂਸਰਾਂ ਦੇ ਪੜਤਾਲਾਂ ਨੂੰ ਮਿਲਾ ਕੇ ਇਕ ਸਾਫ਼ ਅਤੇ ਵਧੀਆ ਅੰਦਾਜ਼ ਪੈਦਾ ਕਰਦਾ ਹੈ—ਜਿਵੇਂ ਤਰਫ, ਰੋਟੇਸ਼ਨ, ਕਦਮ, ਕੰਪਨ ਗੰਭੀਰਤਾ ਜਾਂ "ਸਥਿਰ/ਚਲਨ" ਨਿਰਣਾ।
ਉਦਾਹਰਨ:
ਐਜ 'ਤੇ ਫਿਊਜ਼ਨ ਚਲਾਉਣ ਨਾਲ ਬੈਂਡਵਿੱਥ ਘੱਟ ਹੁੰਦੀ: ਤੁਸੀਂ ਹਜ਼ਾਰਾਂ ਸੈਮਪਲਾਂ ਦੀ ਥਾਂ "tilt = 12°" ਜਾਂ "event detected" ਭੇਜਦੇ ਹੋ।
ਇਹ ਪਰਾਈਵੇਸੀ ਨੂੰ ਵੀ ਸੁਧਾਰਦਾ ਹੈ, ਕਿਉਂਕਿ ਰਾ ਮੋਸ਼ਨ ਟਰੇਸ ਡਿਵਾਈਸ 'ਤੇ ਹੀ ਰਹਿ ਸਕਦੇ ਹਨ ਅਤੇ ਕੇਵਲ ਸੰਘਣੇ ਨਤੀਜੇ ਭੇਜੇ ਜਾਂਦੇ ਹਨ।
ਸੁਰੱਖਿਆ ਇੱਕ ਲੰਮੀ ਲਾਈਫਸਾਇਕਲ ਹੈ:
Provisio ning ਤੋਂ ਲੈ ਕੇ decommissioning ਤੱਕ ਯੋਜਨਾ ਬਣਾਓ: ਕੀ ਇੰਜੈਕਸ਼ਨ, ਅਪਡੇਟ ਮੈਕੈਨਿਜ਼ਮ (A/B swap/ਰੋਲਬੈਕ ਸੁਰੱਖਿਆ), ਅਤੇ credentials ਰਿਵੋਕੇਸ਼ਨ/ਡਾਟਾ ਵਾਈਪ ਸ਼ਾਮਿਲ ਹੋਣ।
ਆਪਣਾ threat model, ਅਪਡੇਟ ਫਲੋ, ਕੀ ਮੈਨੇਜਮੈਂਟ, SBOM ਅਤੇ ਪੈਚ ਨੀਤੀ ਦਸਤਾਵੇਜ਼ ਕਰੋ—ਤਕਸੀਮ ਤੱਕ ਸਰਟੀਫਿਕੇਸ਼ਨ ਦਾ ਦਾਅਵਾ ਨਾ ਕਰੋ ਜਦ ਤੱਕ ਤੁਸੀਂ ਫ਼ੋਰਮਲ ਤੌਰ 'ਤੇ ਪੂਰਾ ਨਾ ਕਰ ਲਓ।