২৩ জুল, ২০২৫·8 মিনিট
STMicroelectronics প্ল্যাটফর্ম এবং সেন্সর: গাড়ি, আইওটি, শিল্প
জানুন কিভাবে STMicroelectronics-র এম্বেডেড প্ল্যাটফর্ম, MCU/MPU এবং সেন্সর ইকোসিস্টেম গাড়ির সেফটি, আইওটি পণ্য, এবং শিল্প নিয়ন্ত্রণ সিস্টেমকে সমর্থন করে।
জানুন কিভাবে STMicroelectronics-র এম্বেডেড প্ল্যাটফর্ম, MCU/MPU এবং সেন্সর ইকোসিস্টেম গাড়ির সেফটি, আইওটি পণ্য, এবং শিল্প নিয়ন্ত্রণ সিস্টেমকে সমর্থন করে।
একটি এম্বেডেড প্ল্যাটফর্ম হলো সেই "পার্টসের কিট" যার ওপর আপনি একটি ইলেকট্রনিক পণ্য গড়েন। সাধারণত এতে থাকে একটি প্রধান চিপ (মাইক্রোকন্ট্রোলার বা প্রসেসর), সহায়ক উপাদান (পাওয়ার, ক্লক, কানেক্টিভিটি), রেফারেন্স ডিজাইন, এবং আইডিয়া থেকে কার্যকর ডিভাইস পর্যন্ত পৌঁছাতে প্রয়োজনীয় সফটওয়্যার টুল ও লাইব্রেরি।
একটি সেন্সর ইকোসিস্টেম হলো মিলিত সেন্সরসমূহ (মোশন, প্রেসার, তাপমাত্রা ইত্যাদি) এবং তাদের ড্রাইভার, ক্যালিব্রেশন নির্দেশিকা, উদাহরণ কোড, এবং কখনও কখনও প্রি-বিল্ট অ্যালগরিদম — যা কাঁচা রিডিংকে ব্যবহারযোগ্য তথ্যেতে রূপান্তর করে।
প্ল্যাটফর্ম গুরুত্বপূর্ণ কারণ এগুলো দলগুলোকে প্রমাণিত বিল্ডিং ব্লক পুনঃব্যবহার করতে দেয়, প্রতি বার বেসিকগুলো পুনরায় আবিষ্কার করার বদলে।
একটি ভালো সাপোর্টেড প্ল্যাটফর্ম পরিবারের মধ্যে থাকলে সাধারণত আপনি পান:
STMicroelectronics-এ “প্ল্যাটফর্ম” বলতে প্রায়ই বোঝায় STM32 (MCU), STM32MPx (MPU), কানেক্টিভিটি চিপ/মডিউল, পাওয়ার সলিউশন, এবং ডেভেলপমেন্ট টুল–এর সমন্বয়; আর সেন্সর ইকোসিস্টেমে সাধারণত থাকে ST MEMS সেন্সর এবং মোশন প্রসেসিং ও এনভায়রনমেন্টাল মেজারমেন্টের জন্য সমর্থন সফটওয়্যার।
এই নিবন্ধটি কেন্দ্রীভূত হয়েছে সাধারণ ST বিল্ডিং ব্লকগুলো এবং কিভাবে এগুলো বাস্তব প্রোডাক্টে একসাথে ফিট করে: কম্পিউট (MCU/MPU), সেন্সিং (MEMS ও এনভায়রনমেন্টাল), কানেক্টিভিটি, পাওয়ার, এবং সিকিউরিটি। লক্ষ্য প্রতিটি পার্ট নামের তালিকা করা নয়, বরং সামঞ্জস্যপূর্ণ উপাদান বেছে নেওয়ার সিস্টেম-চিন্তা বোঝানো।
এই তিনটি ডোমেইন মাথায় রেখে, পরের সেকশনগুলো দেখাবে কিভাবে ST-এর প্ল্যাটফর্ম দৃষ্টিভঙ্গি আপনাকে সহজে বিল্ড, ভ্যালিডেট এবং মেইন্টেইন করার মতো সিস্টেম গঠনে সাহায্য করে।
“ST প্ল্যাটফর্ম” বললে সাধারণত বোঝানো হয় একটি কম্পিউট কোর (MCU বা MPU) প্লাস সেই কোরকে ব্যবহারযোগ্য করে তোলার পারিফেরাল ও সফটওয়্যার সাপোর্ট। সঠিক কোর আগে থেকেই বেছে নেওয়া হলে পরে কষ্টকর রিডিজাইন এড়িয়ে চলা যায়—বিশেষত যখন সেন্সর, কানেক্টিভিটি, এবং রিয়েল-টাইম আচরণ জড়িত থাকে।
মাইক্রোকন্ট্রোলার (MCU) — উদাহরণস্বরূপ STM32 ফ্যামিলিগুলো — ভালভাবে খাপ খায় কন্ট্রোল লুপ, সেন্সর রিড, মোটর ড্রাইভ, সাধারণ ইউজার ইন্টারফেস পরিচালনা, এবং প্রচলিত কানেক্টিভিটি (BLE/Wi‑Fi মডিউল, CAN ট্রান্সসিভার ইত্যাদি) তে। এগুলো সাধারনত দ্রুত বুট করে, একটি প্রধান ফার্মওয়্যার ইমেজ চালায়, এবং নির্ভরযোগ্য টাইমিংয়ে দক্ষ।
মাইক্রোপ্রসেসর (MPU) — যেমন STM32MP1-শ্রেণীর ডিভাইস — ব্যবহার করা হয় যখন দরকার বেশি ডেটা প্রসেসিং, সমৃদ্ধ গ্রাফিক ইউআই, বা লিনাক্স-ভিত্তিক নেটওয়ার্ক স্ট্যাক। এগুলো "অ্যাপ-সদৃশ" ফিচার সহজ করে তুলতে পারে (ওয়েব UI, লগিং, ফাইল সিস্টেম), কিন্তু শক্তি চাহিদা ও সফটওয়্যার জটিলতাও বাড়ে।
কোর কেবল অর্ধেক কাহিনি; পারিফেরাল সেট প্রায়শই সিদ্ধান্তকে চালিত করে:
আপনার ডিজাইনে যদি অনেক হাই-স্পিড SPI বাস, সিঙ্ক্রোনাইজড PWM, বা নির্দিষ্ট CAN ফিচারের প্রয়োজন হয়, তাহলে CPU স্পিডের চেয়ে এগুলো দ্রুত অপশন সংকুচিত করবে।
রিয়েল-টাইম শুধুই "দ্রুত" নয়; এটি কনসিস্টেন্ট হওয়া জরুরি। কনট্রোল সিস্টেম worst-case ল্যাটেন্সি, ইন্টারাপ্ট হ্যান্ডলিং, এবং সেন্সর রিড ও অ্যাকচুয়েটর আউটপুট নির্ধারিত সময়ে হচ্ছে কি না—এসব নিয়ে চিন্তাভাবনা করে। ভাল ডিজাইনকৃত ইন্টারাপ্ট ও টাইমার থাকা MCU সাধারণত ডিটারমিনিজমের সহজ পথ; MPU-তেও সম্ভব, তবে OS ও ড্রাইভার টিউনিং দরকার হয়।
উচ্চ-শেষ প্রসেসর বাইরের চিপগুচ্ছ কমাতে পারে (কম কনপেনিয়ন IC) বা সমৃদ্ধ ফিচার সক্ষম করে, কিন্তু এতে বাড়ে পাওয়ার বাজেট, থার্মাল সীমাবদ্ধতা, এবং ফার্মওয়্যার প্রচেষ্টা (বুট চেইন, ড্রাইভার, সিকিউরিটি আপডেট)। সহজ MCU BOM ও পাওয়ার কমায়, কিন্তু হয়ত ফার্মওয়্যার অপ্টিমাইজেশন বা ডেডিকেটেড অ্যাক্সিলারেটর/পারিফেরাল দরকার হবে।
STMicroelectronics-এর সেন্সর লাইনআপ এত বিস্তৃত যে আপনি একটি স্মার্টওয়াচ থেকে গাড়ির স্ট্যাবিলিটি সিস্টেম পর্যন্ত সব কিছু বানাতে পারেন একই ভেন্ডর না বদলায়। বাস্তব মূল্য হলো ধারাবাহিকতা: অনুরূপ ইলেকট্রিক্যাল ইন্টারফেস, সফটওয়্যার সাপোর্ট, এবং দীর্ঘমেয়াদি উপলব্ধতা—এগুলো প্রোটোটাইপ থেকে ভলিউমে স্কেল করলে সুবিধা দেয়।
প্রচুর এমবেডেড প্রোডাক্ট ছোট সেটের “ওয়ার্কহর্স” সেন্সর দিয়ে শুরু করে:
MEMS হলো micro-electro-mechanical systems: ক্ষুদ্র মেকানিক্যাল স্ট্রাকচার যা সিলিকনে তৈরি এবং প্রায় আইসি মত প্যাকেজ করা হয়। MEMS কম্প্যাক্ট, কম-শক্তি এবং সাশ্রয়ী হওয়ার কারণে ফোন, ইয়ারবাড, বিয়ারেবল, এবং ঘন ইন্ডাস্ট্রিয়াল নোডে ব্যাপকভাবে ব্যবহৃত হয়।
সেন্সর বেছে নেওয়ার সময় সাধারণত তুলনা করে:
ভাল স্পেসিফিকেশনগুলো সাধারণত বেশি খরচ ও শক্তি নেয়, কিন্তু মেকানিক্যাল প্লেসমেন্টও সমানভাবে গুরুত্বপূর্ণ হতে পারে। উদাহরণস্বরূপ, একটি IMU যদি রোটেশনের কেন্দ্র থেকে দূরে বা এক ভাইব্রেটিং মোটরের কাছে মাউন্ট করা হয়, তাহলে ফিল্টারিং ও PCB ডিজাইনে বিশেষ যত্ন নেওয়া লাগবে। কম্প্যাক্ট ডিভাইসে প্রায়ই আপনি কিছুটা কম-শক্তির সেন্সর বেছে নেন এবং প্লেসমেন্ট, ক্যালিব্রেশন, ও ফার্মওয়্যার স্মুদিং-এ বিনিয়োগ করে ইউজার এক্সপেরিয়েন্স অর্জন করেন।
কাঁচা সেন্সর সিগন্যালগুলো নয়েজি, বায়াসযুক্ত, এবং প্রায়শই একরকম বিভ্রান্তিকর হয়। সেন্সর ফিউশন একাধিক সেন্সরের রিডিং (সাধারণত অ্যাক্সেল+গাইরো+ম্যাগ+প্রেসার + কখনও GNSS) মিলিয়ে একটি পরিষ্কার, বেশি অর্থবহ অনুমান তৈরি করে: অরিয়েন্টেশন, মুভমেন্ট, স্টেপ, ভাইব্রেশন গুরুতরতা, বা "স্টিল/মুভিং" সিদ্ধান্ত ইত্যাদি।
একটি একক MEMS অ্যাকসেলরোমিটার আপনাকে অ্যাকসেলration বলতে পারে, কিন্তু গ্র্যাভিটি এবং মোশনের পার্থক্য দ্রুত গতি চলাকালে আলাদা করতে পারে না। একটি জাইরো রোটেশন মসৃণভাবে ট্র্যাক করে, কিন্তু এর অনুমান সময়ের সাথে ড্রিফট করে। একটি ম্যাগনেটোমিটার দীর্ঘমেয়াদি হেডিং ড্রিফট কনট্রোল করতে সাহায্য করে, কিন্তু ধাতু বা মোটরের কাছাকাছি সহজে বিভ্রান্ত হয়। ফিউশন অ্যালগরিদমগুলো এই সব শক্তি ও দুর্বলতাগুলো ব্যালান্স করে স্থিতিশীল ফল দেয়।
এজে ফিউশন চালালে ব্যান্ডউইথ নাটকীয়ভাবে কমে: আপনি হাজার হাজার স্যাম্পল পাঠানোর বদলে "tilt = 12°" পাঠাবেন। এটি প্রাইভেসিও বাড়ায়, কারণ কাঁচা মোশন ট্রেস ডিভাইসে থাকে এবং কেবল ইভেন্ট বা অ্যাগ্রিগেটেড মেট্রিক্স পাঠানো হয়।
নির্ভরযোগ্য ফিউশন ক্যালিব্রেশন (অফসেট, স্কেল ফ্যাক্টর, অ্যালাইনমেন্ট) এবং ফিল্টারিং (লো‑পাস/হাই‑পাস, আউটলায়ার রিজেকশন, তাপমাত্রা কনপেনসেশন) ওপর নির্ভর করে। বাস্তব প্রোডাক্টে আপনাকে ম্যাগনেটিক ইন্টারফেরেন্স, মাউন্টিং অরিয়েন্টেশন পরিবর্তন, এবং ম্যানুফ্যাকচারিং ভৌপরকতার জন্যও পরিকল্পনা করতে হবে—নাহলে একই ডিভাইস ইউনিট থেকে ইউনিটে বা সময়ের সাথে আলাদা আচরণ করতে পারে।
গাড়ি হল একটি বিশেষ ধরনের এমবেডেড পরিবেশ: বৈদ্যুতিকভাবে শোরগোলপূর্ণ, চড়া তাপমাত্রা ওঠানামার এক্সপোজার, এবং বহু বছর কাজ করার প্রত্যাশা। এজন্য অটোমোটিভ-ফোকাসড MCU, সেন্সর, এবং পাওয়ার কম্পোনেন্টগুলোকে প্রায়ই তাদের ক্বালিফিকেশন, ডকুমেন্টেশন, এবং দীর্ঘমেয়াদি উপলব্ধতার জন্য বেছে নেওয়া হয়—শুধু কাঁচা পারফরম্যান্স নয়।
ST প্ল্যাটফর্ম সাধারণত গাড়ির বিভিন্ন “জোন” এ দেখা যায়:
অধিকাংশ অটোমোটিভ ECU একা কাজ করে না—তারা ইন-ভেহিকল নেটওয়ার্কের মাধ্যমে কথা বলে:
একটি MCU-র জন্য বিল্ট-ইন CAN/LIN সাপোর্ট (বা সহজে ট্রান্সসিভারের সাথে জোড়া লাগানো) শুধু ওয়ারিং ও খরচ নয়, টাইমিং আচরণ এবং কীভাবে ECU গাড়িতে একীভূত হবে তাতেও প্রভাব ফেলে।
অটোমোটিভ ডিজাইনকে সহ্য করতে হবে তাপমাত্রা রেঞ্জ, EMI/EMC এক্সপোজার, এবং দীর্ঘ সার্ভিস লাইফটাইম। আলাদাভাবে, ফাংশনাল সেফটি একটি ডেভেলপমেন্ট পদ্ধতি: এটা দাবি করে ডিসিপ্লিনড রিকোয়ারমেন্ট, বিশ্লেষণ, টেস্টিং, এবং টুল সাপোর্ট যেন সেফটি-সংবলিত ফাংশনগুলো পদ্ধতিগতভাবে ইঞ্জিনিয়ারিং ও ভেরিফাই করা হয়। এমনকি যখন ফিচারটি সরাসরি “সেফটি-ক্রিটিক্যাল” না, সেই পদ্ধতির অংশ গ্রহণ করলে লেট-স্টেজ সারপ্রাইজ ও রিডিজাইনের সম্ভাবনা কমে।
অধিকাংশ আইওটি প্রোডাক্ট সফলতা নির্ধারণ করে "অদ্ভুত" সীমাবদ্ধতাগুলোর উপর: ব্যাটারি লাইফ, এনক্লোজার সাইজ, এবং ডিভাইসটি কতটা রেসপনসিভ ও বিশ্বাসযোগ্য অনুভূত হয়। ST প্ল্যাটফর্ম ও সেন্সর ইকোসিস্টেম এখানে নির্বাচন করা হয় কারণ তা দলগুলোকে সেন্সিং সঠিকতা, লোকাল কম্পিউট, এবং কানেক্টিভিটি ব্যালান্স করতে দেয় অতিরিক্ত হার্ডওয়্যার না বাড়িয়েই।
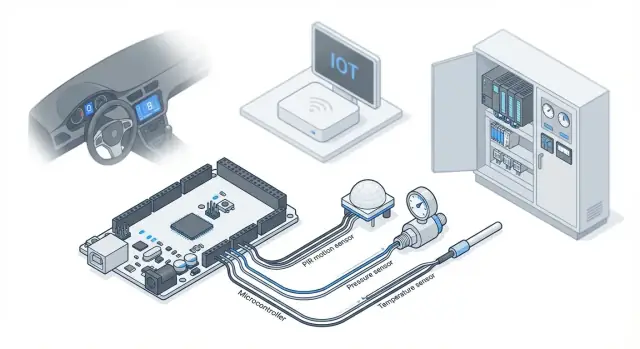
একটি ব্যবহারিক আইওটি পাইপলাইন সাধারণত দেখতে হয়: সেন্সিং → লোকাল কম্পিউট → কানেক্টিভিটি → ক্লাউড/অ্যাপ।
সেন্সর (মোশন, প্রেসার, তাপমাত্রা, বায়োসিগনাল) কাঁচা ডেটা উৎপন্ন করে। একটি লো‑পাওয়ার MCU ফিল্টারিং, থ্রেশহোল্ড, এবং সরল ডিসিশন‑মেকিং করে যাতে রেডিও কেবল তখনই ট্রান্সমিট করে যখন প্রয়োজন। কানেক্টিভিটি (Bluetooth LE, Wi‑Fi, sub‑GHz, সেলুলার, বা LoRa) নির্বাচিত ডেটা ফোন বা গেটওয়ে পাঠায়, যা তাৎক্ষণিকভাবে অ্যাপ/ক্লাউড সার্ভিসে ফরওয়ার্ড করে ড্যাশবোর্ড ও অ্যালার্টের জন্য।
মূল ভাবনা: যত বেশি আপনি লোকালেই সিদ্ধান্ত নিতে পারেন, তত ছোট হবে ব্যাটারি এবং সস্তা হবে কানেক্টিভিটি।
ব্যাটারি লাইফ মোটেই পিক কারেন্ট নিয়ে নয়; এটি হলো ঘন্টায় ডিভাইস কতটা সময় জাগ্রত থাকে তার উপর নির্ভর করে। ভালো ডিজাইন একটি বাজেট দিয়ে শুরু করে: দিনে ডিভাইস কত মিনিট জাগ্রত থাকতে পারে, স্যাম্পলিং/প্রসেসিং/ট্রান্সমিট করতে পারে?
এখানেই সেন্সর ফিচারগুলো MCU-এর মতোই গুরুত্বপূর্ণ: যদি সেন্সর নিজেই অন্যাত্মক ইভেন্ট ডিটেক্ট করতে পারে তবে মেইন প্রসেসর ও রেডিও অপ্রয়োজনে জাগবে না।
UX শুধু অ্যাপ নয়—এটি ডিভাইস কিভাবে আচরণ করে তাও। একটি মোশন সেন্সর যা ভাইব্রেশনে ট্রিগার করে সেটি ভুয়া অ্যালার্ম দেবে; একটি পরিবেশগত সেন্সর ধীর সাড়া দিলে প্রকৃত পরিবর্তন মিস করতে পারে; এবং খারাপ পাওয়ার ডিজাইন "এক-বছর ব্যাটারি" প্রতিশ্রুতিকে তিন মাসে পরিণত করতে পারে।
সেন্সর ও MCU একসাথে বেছে নেওয়া—নয়েজ, ল্যাটেন্সি, ও লো‑পাওয়ার ক্ষমতা বিবেচনায়—আপনাকে এমন একটি ডিভাইস দিতে সাহায্য করবে যা রেসপনসিভ মনে হয়, ফালস অ্যালার্ম কমায়, এবং ব্যাটারি‑লাইফ লক্ষ্য পূরণ করে অতিরিক্ত সাইজ বা খরচ না বাড়িয়েই।
শিল্প নিয়ন্ত্রণ চকচক করা ফিচারের চেয়ে বেশি ‘‘দীর্ঘমেয়াদি পূর্বানুমানযোগ্য আচরণ’’-এর উপর গুরুত্ব দেয়। আপনি যদি PLC-সংলগ্ন মডিউল, মোটর ড্রাইভ, বা কন্ডিশন‑মনিটরিং নোড বানান, প্ল্যাটফর্ম নির্বাচনকে এমনভাবে করতে হবে যাতে ডিটারমিনিস্টিক টাইমিং সাপোর্ট করে, কটু পরিবেশ সইতে পারে, এবং বছর দীঘর সার্ভিসযোগ্য থাকে।
একটি প্রচলিত প্যাটার্ন হল PLC-র পাশে একটি MCU-ভিত্তিক “সাইডকার”: অতিরিক্ত I/O, বিশেষ মেজারমেন্ট, বা কানেক্টিভিটি যোগ করা বিনা-রিডিজাইনের। ST MCUs মোটর কন্ট্রোল (ড্রাইভ, পাম্প, কনভেয়ার), মেটারিং, এবং কন্ডিশন‑মনিটরিং-এও ব্যাপক ব্যবহৃত হয়—প্রায়ই রিয়েল‑টাইম কন্ট্রোল লুপকে সেন্সর সংগ্রহ ও লোকাল ডিসিশন‑মেকিংয়ের সাথে মিলিয়ে।
ডিটারমিনিস্টিক কন্ট্রোল মানে আপনার স্যাম্পলিং, কন্ট্রোল লুপ এক্সিকিউশন, এবং আউটপুট প্রত্যাশামত প্রতিটি সাইকেলে ঘটছে। ব্যবহারিক সক্ষমতাগুলো:
নকশার লক্ষ্য হলো সময়-সংবেদনশীল কাজগুলো স্থিতিশীল রাখা এমনকি যোগাযোগ, লগিং, বা UI ব্যস্ত হলেও।
শিল্প সাইটগুলোতে জুড়ি Mechanical চাপ এবং বৈদ্যুতিক ইন্টারফেরেন্স থাকে যা কনজিউমার ডিভাইস ধরা কখনো পায় না। প্রধান উদ্বেগগুলো: ভাইব্রেশন (বিশেষত মোটর ঘনস্থলে), ধুলো/ময়েশ্চার ইনগ্রেস, এবং সুইচিং লোড থেকে বৈদ্যুতিক নয়িস। সেন্সর নির্বাচন ও প্লেসমেন্ট এখানে গুরুত্বপূর্ণ—ভাইব্রেশন মনিটরিংয়ের জন্য অ্যাক্সেল, ড্রাইভের জন্য কারেন্ট/ভোল্টেজ সেন্সিং, এবং এনক্লোজার শর্ত প্রভাবিত করলে এনভায়রনমেন্টাল সেন্সর লাগতে পারে।
অনেক শিল্প সিগনাল সরাসরি MCU-তে দেওয়া যায় না।
শিল্প ডিপ্লয়মেন্ট দীর্ঘ সার্ভিস লাইফের পরিকল্পনা প্রয়োজন: স্পেয়ার ইউনিট, কম্পোনেন্ট উপলব্ধতা, এবং এমন ফার্মওয়্যার আপডেট যেগুলো অপারেশন বাধাগ্রস্ত না করে। একটি ব্যবহারিক লাইফসাইকেল পদ্ধতিতে থাকবে ভেরশন-ভিত্তিক ফার্মওয়্যার, সেফ আপডেট মেকানিজম, এবং পরিষ্কার ডায়াগনিস্টিক যাতে মেইনটেইনেন্স টিম দ্রুত ট্রাবলশুট করে সরঞ্জাম চালু রাখতে পারে।
কানেক্টিভিটি হলো যেখানে একটি এম্বেডেড প্ল্যাটফর্ম "একটি বোর্ড সহ সেন্সর" হওয়া বন্ধ করে এবং একটি সিস্টেমের অংশ হয়: একটি গাড়ির নেটওয়ার্ক, একটি বিল্ডিংয়ের ডিভাইসঘর, বা একটি প্রোডাকশন লাইন। ST-ভিত্তিক ডিজাইনগুলো সাধারণত MCU/MPU-কে এক বা একাধিক রেডিও বা ওয়ায়ার্ড ইন্টারফেসের সাথে জোড়ায় কাজ অনুসারে।
BLE ফোন, কমিশনিং টুল, বা নিকটতম হাবের সাথে শর্ট‑রেঞ্জ লিংকের জন্য চমৎকার। এটা সাধারণত লো‑পাওয়ারের সহজ পথ, কিন্তু দীর্ঘ দূরত্বে বা উচ্চ ডেটা রেটের জন্য উপযুক্ত নয়।
Wi‑Fi উচ্চ থ্রুপুট দেয় ডাইরেক্ট‑টু‑রাউটার ডিভাইসের জন্য (ক্যামেরা, হোম অ্যাপ্লায়েন্স, গেটওয়ে)। ট্রেড‑অফ হলো শক্তি বেশি এবং অ্যান্টেনা/এনক্লোজার কাজ বেশি প্রয়োজন।
Ethernet কারখানায় নির্ভরযোগ্য ওয়্যার্ড থ্রুপুট ও পূর্বানুমানযোগ্য আচরণের জন্য প্রিয়। এটি গাড়িতে (Automotive Ethernet) ও দেখা যায় যখন ব্যান্ডউইথ প্রয়োজন বেশি হয়।
Cellular (LTE‑M/NB‑IoT/4G/5G) বিস্তীর্ণ এলাকায় কভারেজ দরকার হলে ব্যবহার হয়। এতে খরচ, সার্টিফিকেশন প্রচেষ্টা, এবং শক্তি বিবেচনা বাড়ে—বিশেষত সবসময় অন‑লাইনে থাকলে।
Sub‑GHz (উদাহরণ 868/915 MHz) দীর্ঘ রেঞ্জে কম ডেটা রেটের জন্য উপযুক্ত, প্রায়শই এমন সেন্সরদের জন্য যেখানে বিরল ছোট প্যাকেট রিপোর্ট করা হয়।
শুরু করুন রেঞ্জ ও মেসেজ সাইজ থেকে (একটি তাপমাত্রা রিডিং বনাম অডিও স্ট্রিমিং), তারপর যাচাই করুন ব্যাটারি লাইফ ও পিক কারেন্ট প্রয়োজন। শেষে সাংগঠনিক আইন/নিয়ম বিবেচনা করুন (লাইসেন্সড সেলুলার বনাম আনলিসেন্সড সাব‑GHz সীমা, চ্যানেল প্ল্যান, ট্রান্সমিট পাওয়ার)।
লোকাল গেটওয়ে উপযোগী যখন আপনার আল্ট্রা-লো-পাওয়ার এন্ডপয়েন্ট দরকার, বিভিন্ন প্রোটোকল ব্রিজ করতে হবে (BLE/sub‑GHz থেকে Ethernet), অথবা ইন্টারনেট ড্রপ করলে লোকাল বাফারিং প্রয়োজন।
ডাইরেক্ট‑টু‑ক্লাউড আরকিটেকচার সরল করে যদি ডিভাইস একক (Wi‑Fi/সেলুলার) হয়, কিন্তু এতে পাওয়ার ডিজাইন, প্রোভিশনিং, এবং চলমান কানেক্টিভিটি খরচ বেড়ে যায়।
অ্যান্টেনা পারফরম্যান্স ধাতব হাউজিং, ব্যাটারি, কেবল বান্ডল, বা এমনকি ব্যবহারকারীর হাত দ্বারা নষ্ট হতে পারে। ক্লিয়ারেন্স পরিকল্পনা করুন, উপকরণ সাবধানে নির্বাচন করুন, এবং ফাইনাল এনক্লোজারের সাথে শুরুর দিকে টেস্ট করুন—কানেক্টিভিটি সমস্যা প্রায়ই মেকানিক্যাল, না যে ফার্মওয়্যার‑সমস্যা।
সিকিউরিটি কোনো একক ফিচার নয় যা আপনি পরে যোগ করবেন। এম্বেডেড প্ল্যাটফর্ম ও সেন্সরের ক্ষেত্রে, এটি একটি সিদ্ধান্তশ্রেণী যা ডিভাইস পাওয়ার অন হওয়ার মুহূর্ত থেকেই শুরু হয়ে প্রতিটি ফার্মওয়্যার আপডেট পর্যন্ত চলবে।
একটি সাধারণ ভিত্তি হলো secure boot: ডিভাইস চালু হলে ফার্মওয়্যার অথেনটিসিটি যাচাই করে তারপরই চালায়। ST প্ল্যাটফর্মে এটি প্রায়ই হার্ডওয়্যার রুট‑অফ‑ট্রাস্ট (MCU সিকিউরিটি ফিচার এবং/অথবা ডেডিকেটেড সিকিউর এলিমেন্ট) এবং সাইন করা ইমেজ দিয়ে বাস্তবায়িত হয়।
তারপর আসে কী স্টোরেজ। কী‑গুলো এমন স্থানে থাকা উচিত যেগুলো এক্সট্র্যাকশনের বিরুদ্ধে রোধ করতে পারে—প্রটেকটেড MCU রিজিয়ন বা সিকিউর এলিমেন্ট—সাধারণ ফ্ল্যাশে নয়। এতে এনক্রিপ্টেড ফার্মওয়্যার আপডেট সমর্থন সম্ভব হয়, যেখানে ডিভাইস নিদর্শন যাচাই (ইন্টিগ্রিটি/অথেনটিসিটি) এবং প্রয়োজনে পে-লোড ডিক্রিপ্ট করে (গোপনীয়তা) ইনস্টল করে।
কনজিউমার আইওটি ডিভাইস সাধারণত বড়‑সিনামায়, রিমোট আক্রমণের সম্মুখীন হয় (বটনেট, ক্রিডেনশিয়াল স্টাফিং, সহজ শারীরিক অ্যাক্সেস)। শিল্প সিস্টেমগুলো টার্গেটেড বিঘ্নিতকরণ, ডাউনটাইম, এবং দীর্ঘ সার্ভিস লাইফ যেখানে প্যাচ উইন্ডো সীমিত—এগুলো নিয়ে বেশি চিন্তিত। অটোমোটিভ ইলেকট্রোনিক্সে সেফটি-সংলগ্ন ঝুঁকি, জটিল সাপ্লাই চেইন, এবং কে কি আপডেট করতে পারে—এসব কঠোর নিয়ন্ত্রণ প্রয়োজন।
প্রোভিশনিং (ম্যানুফ্যাকচারিং সময় কী/আইডেন্টিটি ইনজেকশন), আপডেট (A/B_swap বা রোলব্যাক প্রোটেকশন যাতে ব্রিক হওয়া না হয়), এবং ডিকমিশনিং (ক্রেডেনশিয়াল রিভোকেশন, সংবেদনশীল ডেটা মুছা, এবং ইন্ড‑অফ‑সাপোর্ট আচরণ)—এসবের পরিকল্পনা করুন।
রেকর্ড রাখুন: আপনার থ্রেট মডেল, secure boot/update ফ্লো, কী ম্যানেজমেন্ট ও রোটেশন পদ্ধতি, ভাইটহ্যাট ভজনা (vulnerability intake) এবং প্যাচ পলিসি, SBOM, এবং টেস্ট প্রমাণ (পেন‑টেস্ট ফলাফল, ফাজিং নোটস, সিকিউর কোডিং অনুশীলন)। আপনি করণীয়গুলো বর্ণনা করুন ও পরিমাপ করুন—সার্টিফিকেশন দাবি করবেন না যদি আনুষ্ঠানিকভাবে সম্পন্ন না করে থাকেন।
শক্তি ও তাপ এম্বেডেড প্রোডাক্টে ঘনিষ্ঠভাবে যুক্ত: প্রতিটি অপব্যবহৃত মিলিওয়াট তাপমাত্রা বাড়ায়, এবং তাপমাত্রা সরাসরি সেন্সর সঠিকতা, ব্যাটারি কর্মক্ষমতা, এবং দীর্ঘমেয়াদি নির্ভরযোগ্যতাকে প্রভাবিত করে। এটা শুরুতেই ঠিক না করলে পরে বোর্ড স্পিনে ঝামেলা হয়।
অধিকাংশ ডিজাইন কিছু রেইলে শেষ হয়: ব্যাটারি/ইনপুট রেইল, এক বা একাধিক রেগুলেটেড লজিক রেইল (সাধারণত 3.3 V এবং/অথবা 1.8 V), এবং মাঝে মাঝে এক উচ্চ রেইল অ্যাকচুয়েটর বা ডিসপ্লে জন্য।
কিছু ব্যবহারিক রুল অফ থাম্ব:
ব্যাটারি ম্যানেজমেন্টের বেসিক: কেমিস্ট্রির সাথে মেলে এমন প্রোটেকশন/চার্জিং বেছে নিন, এবং ব্রাউনআউট আচরণ (ব্যাটারি স্যাগ হলে MCU, সেন্সর, ও মেমোরি কী করে) জন্য বাজেট রাখুন।
অনেক পণ্য ব্যাটারি‑লাইফ লক্ষ্য মিস করে কারণ তারা গড় কারেন্ট ডিজাইন করে কিন্তু শিখে না পিকগুলো সম্পর্কে:
আপনার রেগুলেটর ও ডিক্যুপ্লিং পিকগুলো হ্যান্ডেল করবে এমন হতে হবে, আর ফার্মওয়্যার গড় কম রাখতে স্লিপ মোড ও ডিউটি‑সাইক্লিং নিশ্চিত করতে হবে।
তাপ শুধু চিপ সম্পর্কিত নয়। এনক্লোজার উপাদান, এয়ারফ্লো, ও মাউন্টিং সারফেস প্রায়ই ডোমিনেট করে। সবসময় সচেতন থাকুন:
একবার প্রোটোটাইপ কাজ করলে কাজ শেষ নয়। বাস্তব টাইম‑সেভার হল ST প্ল্যাটফর্ম ঘিরে থাকা ইকোসিস্টেম ব্যবহার করে রিডওয়ার্ক কমানো — বোর্ড স্পিন, সার্টিফিকেশন, বা ম্যানুফ্যাকচারিং রান সিদ্ধান্ত নেওয়ার আগেই।
ST‑এর ইভ্যাল্যুয়েশন বোর্ড ও উদাহরণ প্রকল্প আপনাকে দ্রুত আইডিয়া প্রুফ করতে দেয় এবং পরবর্তীতে প্রোডাকশনের পথে রাখে:
এইগুলোকে "লার্নিং হার্ডওয়্যার" হিসেবে বিবেচনা করুন: আপনি কী পরিবর্তন করেছেন তা ডকুমেন্ট করুন, এবং যে অনুমানগুলো এখনও আপনার বোর্ডে যাচাই করতে হবে সেগুলোর একটি তালিকা রাখুন।
যদিও এম্বেডেড অংশ "ডান" হয়ে গেল, অধিকাংশ প্রোডাক্টে এখনও প্রয়োজন একটি কম্প্যানিয়ন স্তর: প্রোভিশনিং স্ক্রিন, ড্যাশবোর্ড, লগ, অ্যালার্টিং, এবং ম্যানুফ্যাকচারিং ও ফিল্ড সাপোর্টের জন্য সরল API। দলগুলো প্রায়ই এই কাজকে হালকাভাবে নেয়।
এখানেই একটি ভিব‑কোডিং ওয়ার্কফ্লো যেমন Koder.ai ব্যবহার উপযোগী: আপনি একটি হালকা‑ওজন ওয়েব ড্যাশবোর্ড, একটি ছোট Go + PostgreSQL ব্যাকএন্ড, বা একটি Flutter মোবাইল কম্প্যানিয়ন অ্যাপ চ্যাট‑ভিত্তিক স্পেক থেকে জেনারেট করে দ্রুত ইটারেট করতে পারেন। এটি বিশেষভাবে পাইলট রানে কাজে লাগে যখন আপনি ধারাবাহিকভাবে কি লগ করে কিভাবে ভিজ্যুয়ালাইজ করবেন তা ঠিক করছেন।
কিছু বিল্ড‑ফেইল শুধুমাত্র বাস্তবে ডিভাইস তৈরি হলে দেখা দেয়:
সাধারণ ফাঁদগুলোর মধ্যে আছে কম্পোনেন্ট উপলব্ধতা, অনুপস্থিত টেস্ট পয়েন্ট (SWD, পাওয়ার রেইল, সেন্সর ইন্টারাপ্ট), এবং কোনো পরিকল্পনা না থাকা ম্যানুফ্যাকচারিং টেস্ট (প্রোগ্রামিং, ক্যালিব্রেশন, বেসিক RF/সেন্সর চেক)। টেস্ট ও ক্যালিব্রেশন চিন্তা করে ডিজাইন করলে প্রতিটি ব্যাচে দিন বাঁচে।
এক পেজ KPIs (ব্যাটারি লাইফ, রিকনেক্ট টাইম, সেন্সর ড্রিফট, ফালস অ্যালার্ম), এবং একটি সাদামাটা ফিল্ড ডেটা প্ল্যান (কি লগ করবেন, কত ঘন, ও কিভাবে রিট্রিভ করবেন) ঠিক করে দিন। এতে পাইলট ফিডব্যাক সিদ্ধান্তে পরিণত হয়, মতাময়ে নয়।
একটি MCU/MPU প্ল্যাটফর্ম ও সেন্সর সেট বেছে নেওয়া সহজ হয় যখন আপনি এটাকে একটি ফানেল-এর মতো বিবেচনা করেন: প্রয়োজন থেকে শুরু করুন, সীমাবদ্ধতা দিয়ে সংকুচিত করুন, তারপর বাস্তব পরীক্ষার মাধ্যমে যাচাই করুন।
পরিমাপযোগ্য লক্ষ্য নির্ধারণ করুন: সেন্সিং রেঞ্জ, সঠিকতা, ল্যাটেন্সি, স্যাম্পলিং রেট, অপারেটিং তাপমাত্রা, লাইফটাইম, এবং যে স্ট্যান্ডার্ডগুলো মেনে চলতে হবে।
হার্ড লিমিট তালিকা করুন: BOM খরচ, ব্যাটারি লাইফ, PCB এলাকা, এনক্লোজার উপকরণ, উপলব্ধ ইন্টারফেস (I²C/SPI/CAN/Ethernet), এবং রেগুলেটরি প্রয়োজনীয়তা।
2–3 প্ল্যাটফর্ম + সেন্সর “বাণ্ডিল” শর্টলিস্ট করুন যা ইন্টারফেস ও পাওয়ার বাজেট মিলে। সফটওয়্যার স্টোরিও যোগ করুন: ড্রাইভার, মিডলওয়্যার, রেফারেন্স ডিজাইন, এবং আপনি ফিউশন ডিভাইসে চালাবেন নাকি অফলোড করবেন।
দ্রুত পরীক্ষা চালান: মোশন/তাপমাত্রা সুইপ, ভাইব্রেশন টেস্ট, আনফর্মাল EMC, এবং সঠিকতা চেক যা পরিচিত রেফারেন্সের বিরুদ্ধে। বাস্তব ডিউটি‑সাইকেলে পাওয়ার মাপুন—শুধু ডাটাশিট “টিপিক্যাল” নয়।
| Criterion | Option A | Option B | Notes |
|---|---|---|---|
| Cost (BOM + manufacturing) | Include test time and connectors | ||
| Power (active + sleep) | Use your real duty cycle | ||
| Accuracy & drift | Consider calibration effort | ||
| Compute headroom | Fusion, filtering, ML, safety margin | ||
| Connectivity fit | Bandwidth, latency, coexistence | ||
| Security & lifecycle | Secure boot, keys, updates |
An embedded platform হল একটি পুনঃব্যবহারযোগ্য ভিত্তি যা কোনো প্রোডাক্টের রূপরেখা তৈরি করে: প্রধান কমpute ডিভাইস (MCU/MPU), সহায়ক উপাদান (পাওয়ার, ক্লক, কানেক্টিভিটি), পাশাপাশি ডেভেলপমেন্ট টুল, রেফারেন্স ডিজাইন ও ফার্মওয়্যার লাইব্রেরি।
একই প্ল্যাটফর্ম পরিবারের মধ্যে থেকে কাজ করলে সাধারণত রিডিজাইনের ঝুঁকি কমে এবং প্রোটোটাইপ থেকে প্রোডাকশনে যাওয়ার গতি বাড়ে।
একটি সেন্সর ইকোসিস্টেম শুধু সেন্সরের অংশ নম্বর নয়। এতে ড্রাইভার, উদাহরণ কোড, ক্যালিব্রেশন নির্দেশনা এবং মাঝে মাঝে প্রস্তুত অ্যালগরিদম থাকে, যা কাঁচা ডেটাকে ব্যবহারযোগ্য আউটপুটে (ইভেন্ট, অরিয়েন্টেশন, মেট্রিক) রূপান্তর করে।
ফলত: ইন্টিগ্রেশন দ্রুত হয় এবং প্রোটোটাইপ থেকে ভলিউমে যাওয়ার সময় কম অপ্রত্যাশিত সমস্যা দেখা দেয়।
MCU বেছে নিন যখন আপনার দরকার:
MPU বেছে নিন যখন আপনার দরকার:
অধিকাংশ ক্ষেত্রে পারিফেরাল সেট CPU স্পিডের চেয়ে দ্রুত আপনার অপশন সংকুচিত করে। সাধারণ ‘ডিজাইন-নির্ধারক’ গুলো:
রিয়েল-টাইম বলতে শুধুই ‘দ্রুত’ নয়—এটি হল কনসিস্টেন্ট সময়ানুবর্তিতা। প্র্যাকটিক্যাল ধাপগুলো:
সাধারণত MCUs রিয়েল-টাইম পক্ষে সহজ পথ; MPUs-এ OS/ড্রাইভার টিউনিং প্রয়োজন হয়।
MEMS (micro-electro-mechanical systems) হল সিলিকনে তৈরিকৃত ক্ষুদ্র মেকানিক্যাল স্ট্রাকচার, যেগুলো আইসি-এর মতো প্যাকেজেড হয়।
এগুলো জনপ্রিয় কারণ: ছোট, কম পাওয়ার-পরিচালিত, এবং কষ্টসাধ্যভাবে বড় পরিমাণে উৎপাদনযোগ্য—ফলত ওয়াচ, ফোন, বিয়ারেবল ও ঘন শিল্প নোডে উপযুক্ত ও সাশ্রয়ী।
সিস্টেম আচরণ পরিবর্তন করে এমন বিষয়গুলোতে ফোকাস করুন:
তারপর আপনার বাস্তব মেকানিক্যাল মাউন্টিং ও এনক্লোজারের সাথে যাচাই করুন—প্লেসমেন্ট প্রায়ই ডাটাশিট পার্থক্যকে ডোমিনেট করে।
ফিউজন সাধারণত অ্যাকসেল + গাইরো + ম্যাগনেটোমিটার (কখনও প্রেসার/জিএনএসএস) মিলিয়ে আউটপুট তৈরি করে: অরিয়েন্টেশন, মুভমেন্ট, স্টেপ, ভাইব্রেশন ভ severity, বা স্টিল/মুভিং সিদ্ধান্ত।
এটি দরকার কারণ প্রতিটি সেন্সরের একক দুর্বলতা আছে (উদাহরণ: গাইরো ড্রিফট, ম্যাগনেটোমিটার ইন্টারফেরেন্স, অ্যাকসেল গ্র্যাভিটি বিভ্রান্তি)। ফিউজন এই ত্রুটিগুলোকে ব্যালান্স করে স্থিতিশীল ফল দেয়।
এজে ফিউজন চালালে ব্যান্ডউইথ ও পাওয়ার দুটোই অনেক কমে: আপনি হাজার হাজার স্যাম্পল পাঠানোর বদলে “tilt = 12°” পাঠাবেন।
এতে প্রাইভেসিও বাড়ে কারণ কাঁচা মোশন ট্রেস ডিভাইসে থেকে যায় এবং শুধুমাত্র ইভেন্ট বা নির্দিষ্ট মেট্রিক পাঠানো হয়।
সিকিউরিটি একটি লাইফসাইকেল হিসেবে বিবেচনা করুন:
থ্রেট মডেল, আপডেট ফ্লো, কী ম্যানেজমেন্ট, SBOM ও প্যাচ পলিসির রেকর্ড রাখুন—সার্টিফিকেট দাবি করবেন না যদি তা আপনারা আনুষ্ঠানিকভাবে না পেয়ে থাকেন।